秘书处于2025年3月14日组织来自联合电子、上汽研发总院、上汽商用车技术中心、上汽大众、上汽制动系统共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组利用40辆社会私家车采集了上海市实际道路行驶数据,分析构建了上海市电动乘用车循环工况(SHLTC);建立了前驱、后驱纯电动车辆模型,提出了对应的复合制动控制策略以及适用于上海城市道路特征工况的电动乘用车制动能量回收策略,在五菱F510样车上,对不同控制策略进行了转毂对比实验,验证了复合制动策略的合理性,相对于原车策略,能量回收得到一定程度的提高。在此基础上,研究制订了由制动能量回收性能、制动舒适性、制动切换平顺性三个维度构成的电动乘用车制动能量回收测试评价规范。以上研究成果经企业消化、吸收后,其中的基于上海市电动乘用车循环工况的前驱制动能量回收策略在XBS线控液压系统中得到了应用。
经专家评定,综合得分70.7分,同意验收。
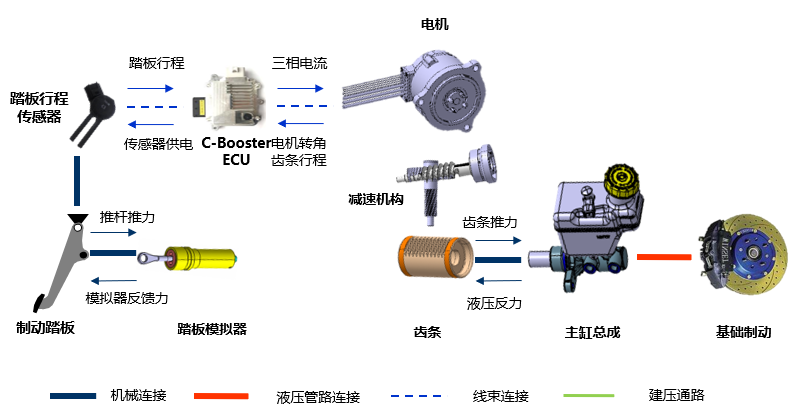
XBS系统工作原理图
]]>秘书处于2025年1月17日组织来自上汽研发总院、智己汽车、零束科技、上汽商用车技术中心、泛亚技术中心共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组基于 OMNeT++ 开源软件研究开发了包括激光雷达、毫米波雷达、工业相机、GPS、惯导系统等传感器和交换机设备的模块化、可扩展的时间敏感网络仿真平台,支持星形、树形、环形、菊花链等拓扑结构,可灵活快速适应不同智能驾驶车辆的网络构型仿真测试需求。研究搭建了包含12个毫米波雷达、1个激光雷达、4个环视摄像头、3个高清摄像头、20个超声波雷达、5个TSN交换机、1个工控机、1个惯性导航系统以及北斗定位系统的TSN硬件在环移动小车测试台架,实现了车载时间敏感网络(TSN)在复杂环境中的测试验证能力,可真实模拟自动驾驶环境中数据负载和网络实时状态,多次实验结果表明:在自适应巡航(ACC)、车道保持系统(LKA)、变道辅助系统(SWA)、自主泊车系统(APS)和交通标志识别(TSR)等多种业务场景下,可实现高精度的时间同步和低延迟的数据传输,为TSN车载网络落地应用提供了可行参考方案。
经专家评定,综合得分80.5分,同意验收。

车载以太网硬件在环移动小车测试台架
]]>2025年1月24日下午,基金会秘书处组织同济大学、上汽变速器公司、商用车技术中心、研发总院、联合电子、泛亚、华域股份等单位共25人,通过腾讯会议方式,对基金会产学研项目《智能化自行走底盘系统设计与动态协调控制研究》(2212课题)进行了阶段性(中期一阶段)研究成果技术汇报交流。
本课题根据轮毂电动轮构型分析以及车轮空间布置条件,选择内转子扁线电机、行星减速器与鼓式制动器的集成方案,打破国外专利封锁,提出一种新型轮毂电动轮构型,实现与大通EV90的集成。根据整车性能指标得到电机性能指标,结合电机设计空间,进行了电机结构设计和冷却系统设计;确定电机的电磁参数和结构参数,并完成了电机系统在电动轮内的集成;根据整车-减速器参数匹配表选定行星齿轮减速器的速比,进行几何构型和关键参数匹配设计,开展了电动轮总成动密封系统、轴承支撑系统和壳体支撑系统设计;匹配了制动系统的性能指标,确定了制动系统的设计空间;开展了电动轮制动系统的集成设计,根据结构关键参数和电机控制参数完成了电机控制器选型匹配与接口设计、线束分类与连接策略设计等工作。
项目研制工作达到了中期(一阶段)的预期目标。
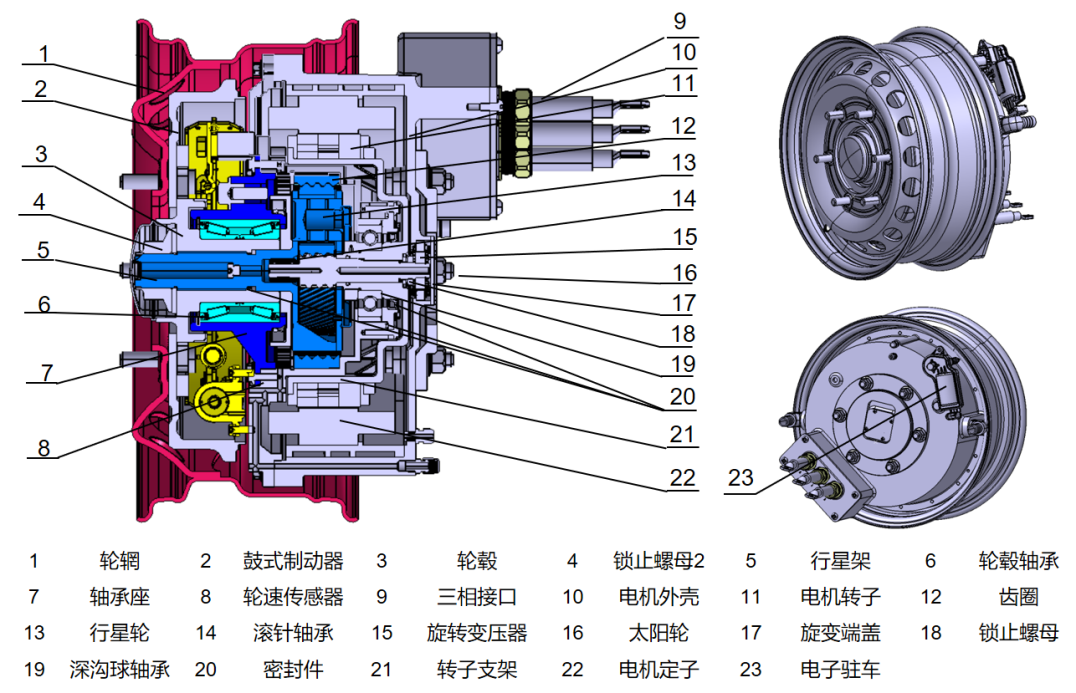
电动轮三维模型图
]]>基金会秘书处于2025年1月23日组织来自研发总院、智己汽车、上汽大众、商用车技术中心、联合电子共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组通过深入的国内外研究现状调研分析,成功构建了驾驶情绪评价体系,并建立了多模态结构化情绪刺激库;完成20次多通道情感感知数据试采集实验,采集被试脑电、心电、主观数据;通过数据分析确定了后续采集环境所需情绪刺激物的最佳模态;基于试采集实验,进行了驾驶情绪多通道信息采集正式实验,收集到28位被试表情、语音、文本数据,招募并培训标注员对数据进行情感标签标注,共获得了140份完整的标注数据,总计标注数据量达到20032条,为建立智能座舱多模态情绪识别系统奠定了坚实基础。
项目组完成了计划任务书的各项指标,提供了齐全的技术文件,验收组专家一致同意通过验收。经专家评定,综合得分70.2分,顺利通过验收。
项目的成功验收,标志着上海交通大学与零束科技在智能座舱多模态情绪识别系统领域的研究迈出了重要一步,为未来的智能驾驶体验设计提供了新的研究空间。

驾驶情绪识别实验设计
]]>
秘书处于2025年1月17日组织来自上汽研发总院、泛亚技术中心、友道智途、赛可智能、零束科技共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组基于搭建的3个路侧感知平台(同济智能网联汽车测试场、安亭昌吉东路-于塘路十字路口、无锡车联网先导区和风路路段)与1个移动感知平台,研究提出的分布式多模态感知设备的空间标定、时间同步与数据帧对齐方法,可满足车路协同感知的时空同步需求;研究提出的静态、半静态、动态目标感知算法以及支持中融合和后融合的车路协同融合方法,研究设计的C-V2X车路通信协议栈以及基于车路协同感知融合的高精度地图管理与更新系统,可实现静态、半静态、动态目标检测、地图匹配与更新功能。以上成果经企业吸收消化后,在临港新片区云控平台高精度地图更新项目中得到了应用,实现了云控平台与路侧RSU设备、测绘车、众包车、用户车辆之间针对道路施工、交通拥堵、临时交通管制等动态信息实时采集、传输、分析处理、地图更新等功能,可提高数据的准确性和时效性,提升车辆驾乘体验。
经专家评定,综合得分77.9分,同意验收。
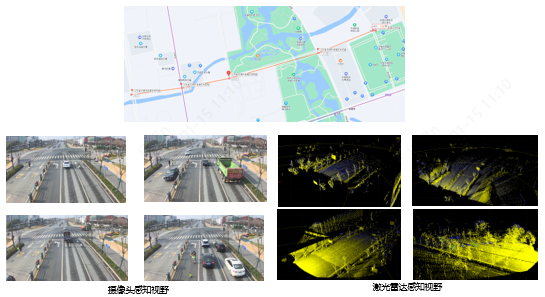
无锡车联网先导区路侧感知系统
]]>秘书处于2025年1月10日组织来自联合电子、上汽研发总院、上汽商用车技术中心、上汽大众、上汽制动系统共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组研究采用基于3-Box构型提出的满足L3驾驶场景需求的液压线控制动系统方案,可实现E-Pedal与执行部件之间的全解耦;采用功能安全分析方法设计的系统架构并开发的主要部件,可保证E-Pedal高安全冗余要求;研究开发的驾驶员制动意图识别(DBR)算法、以及EBS冗余ABS算法,在系统特定单点失效情况下仍能实现双重冗余制动控制,并满足车辆在ESC防抱制动功能失效情况下的制动方向稳定性要求,在高校搭建的MIL环境下得到了验证。项目组全新研究试制了E-Pedal样件、研究改制了EBS样件和ESC样件,集成的3-Box功能在高校搭建的整车级HIL台架上得到了验证,进一步将该3-Box总成改装在企业试验车辆(雪佛兰)上进行了E-Pedal输入输出特性、EBS失效冗余激活响应时间特性和车辆线控制动性能实车测试,结果表明:所研制的3-Box全解耦液压线控制动系统及E-Pedal样件、相关算法基本满足在复杂工况下的制动性能和安全要求,具备一定产业化基础。
经专家评定,综合得分74.7分,同意验收。
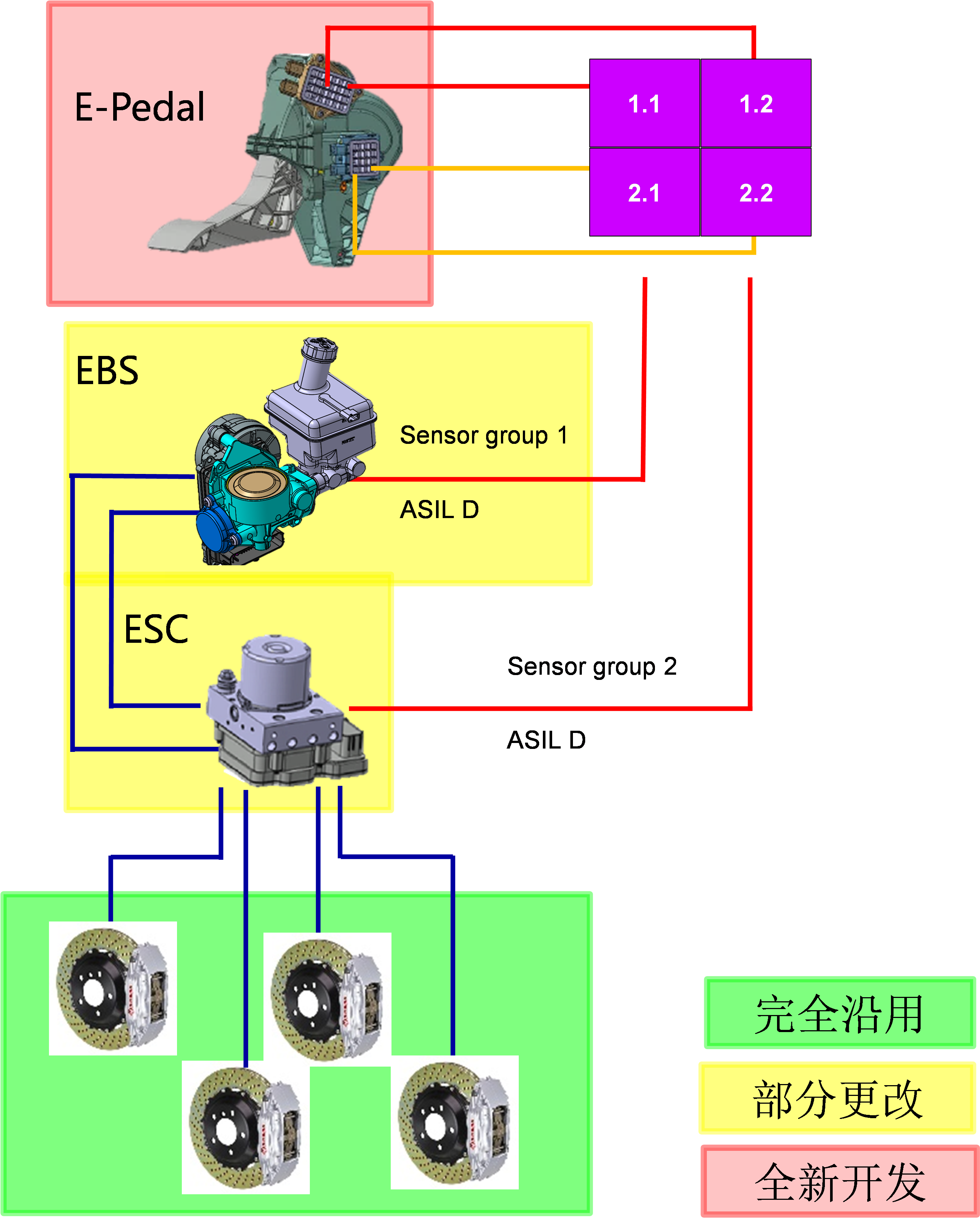
Three-box(E-Pedal+EBS+ESC)技术方案
]]>秘书处于2024年12月31日组织来自上汽大众、智己汽车、赛可智能、上汽商用车技术中心、泛亚技术中心共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
课题组采集了包含乘员生理数据和主观舒适度评价的自然驾驶数据,研究筛选总结6类高发认知不舒适场景(变道超车、路口转弯等),形成54个基础场景;基于皮肤电、心电和眼动等生理信号,研究得到与乘员认知不舒适显著相关的生理表征指标集;聚焦变道超车场景,研究构建了以生理指标为输入的乘员认知不舒适度评价模型;基于场景风险诱因分析提出认知舒适性行驶策略改进建议,能有效提升认知舒适性评价结果。由此形成了企业标准1项、发明专利1项、软件著作权1项。以上成果经企业吸收转化与改进后,将变道超车场景不舒适度评价模型接入到现有实车数据采集平台,并基于追击场景验证了该模型的泛化性,初步形成了实车主客观“采测评”一体化认知舒适性测评系统,突破现阶段依赖主观评估的局限,有助于指导智驾策略和方案的选择与优化,进一步提高智驾产品品质。
经专家评定,综合得分72.9分,同意验收。

“采测评”一体化数据采集软硬件平台
]]>秘书处于2024年12月17日组织来自零束科技、上汽研发总院、友道智途、赛可智能、上汽大众共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
课题组从图像、特征、标签三个不同的角度,开展了智能驾驶摄像头数据和模型的迁移研究和应用研究,提出一套整合多种算法的迁移模型框架,包括基于特征对抗(包括全局特征对抗、层级特征对抗、类别特征对抗等)目标检测迁移算法、基于标签级领域(包括伪标签生成和知识蒸馏)目标检测迁移算法。研究成果在企业真实场景数据集中进行了测试,mAP可达0.675(比基线模型mAP 0.622提升了5.3%,与oracle理想上界模型mAP0.676仅有-0.1%差异),整体算法模型改善效果明显。以上研究成果经企业消化吸收改进后,集成应用在量产项目智己L7和智己LS7前大灯目标识别模块,使mAP指标分别提升了1.3%和1.2%;集成应用在小鹏汇天CMS电子后视镜目标识别模块,使mAP指标提升了7.2%,等等,有效改善了企业原有目标检测模块的检测能力和泛化性能。
经专家评定,综合得分72.9分,同意验收。

整合模型框架检测结果可视化效果图
(左侧为不使用迁移算法结果,右侧为使用迁移算法结果)
]]>秘书处于2024年12月5日组织来自上汽研发总院、联合电子、上汽商用车技术中心、泛亚技术中心、上汽大众共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组基于镇江市某区域(涵盖高架、郊区和城市道路场景)真实路网信息和交通流数据、交通信号配时信息,研究建立了交通场景数据孪生仿真模型、以及表征不同驾驶风格的参数化驾驶员模型;针对上汽EDU Gen 2代混合动力汽车,研究提出了考虑车速、踏板开度、模式的三参数混合动力变速箱换挡策略以及基于DIRECT算法的换挡参数优化方法,创新提出了V2X环境下考虑交通信息的SOC轨迹规划方法、以及基于DDQN深度强化学习和ECMS的混合动力汽车智能能量管理策略;研究搭建了考虑真实交通流、以及实车控制器的新能源汽车智能能量管理策略数据孪生测试平台,经对以上控制策略仿真测试验证,混合动力汽车发动机油耗在三种不同场景典型路段下节油效果明显。经企业吸收消化后,改进了现有仿真控制算法及仿真测试平台,支撑了复杂工况的仿真验证与高效测试。该数字孪生硬件在环测试平台针对当前面临的“标准工况测试导致整车经济性评估不准、实车复杂交通场景测试人力物力时间成本高”等难题,提供了可行的解决方案。
经专家评定,综合得分75.3分,同意验收。

智能能量管理策略数据孪生测试平台
]]>秘书处于2024年11月27日组织来自智己汽车、零束科技、友道智途、赛可智能、上汽大众共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组基于中外自然驾驶数据和企业自有自然驾驶数据,研究设计了通用的驾驶数据处理与场景提取框架,构建了企业特色的自然驾驶数据库;创新开发了考虑”感知受限”、”驾驶分心”和”反应延迟”等因素的拟人化跟车模型、以及考虑”跟车忍耐度”和”换道礼让度”等心理因素的拟人化换道模型,提升了测试场景的真实性与多样性;提出了自主随机特性的拟人化行为关联测试方法以及行为关联测试矩阵,有效提升了高风险事件激发能力,等等;以上研究成果在高校搭建的轻量化仿真平台上得到了验证,并与企业仿真测试平台反复调试后达到了无缝集成,经对企业不同版本在研智能驾驶算法硬件在环测试,结果表明:集成以上研究成果的仿真平台有效解决了企业原有仿真场景中“背景车辆无法拟人化地与被测对象交互、无法真实地模拟现实交通场景”等固有测试矩阵所存在的问题,大大提高了测试结果的真实性与有效性。
经专家评定,综合得分81.3分,同意验收。
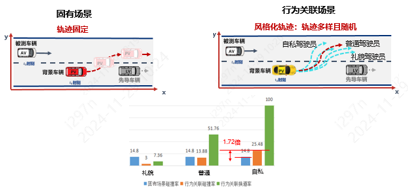
考虑礼让参数的行为关联测试场景下碰撞率对比
]]>