项目编号:??????? 1609???????
主动悬置及控制策略研究
Study on the Active Controlled Mount and the Control Strategy
项目研制单位:同济大学 泛亚汽车技术中心有限公司
主要研制人员:左曙光 周大为? 阎礁? 安一领? 王珺? 胡坤
主题词:主动悬置 三缸发动机? NVH
1、研究内容介绍
1.1 研究目的意义
目前的主动悬置大都针对四缸发动机的2阶垂向振动,而三缸发动机具有不同方向、强度相当的1阶和1.5阶两个激励,三缸发动机减振措施主要有附加平衡轴、配重块等,在减振降噪的同时会牺牲燃油经济性,使用主动悬置隔振系统可以避免此问题。由于四缸发动机的主动悬置无法直接应用于三缸发动机,本课题将针对三缸发动机开发主动悬置及控制策略,提升三缸发动机NVH性能,具有重要经济和社会意义。
1.2 需要解决的关键技术
已有的主动悬置研究存在局限:主动悬置动特性预测工作通常使用集总参数建模的方法,未建立结构参数与悬置动特性的关系,导致悬置与作动器集成后主动悬置固有特性易发生恶化。电磁作动器常用的形式为电致伸缩式和电磁式,前者体积庞大,成本高昂,难以量产;后者采用螺线管式,比功率较低。悬置的相关控制方法研究,大都针对四缸发动机的二阶垂向振动,没有针对三缸发动机多阶次、多维度耦合激励的控制方法研究。
本项目需要解决的关键技术有以下方面:(1)建立液压悬置集总参数估算模型,在仅提供结构参数的前提下快速预测主动悬置动态特性变化规律;(2)设计一种具有高比功率的微型电磁作动器,满足主动隔振能力需求,能与现有液压悬置集成;(3)研究多阶次、多维度耦合激励下主动悬置控制技术,同时消除两个不同方向、不同频率的阶次振动,满足三缸发动机多工况的隔振需求。
1.3 采用的技术路线和研究方法
本项目采用的技术路线如图1.1。主要内容有:建立三缸发动机多体动力学模型,分析发动机激励,建立隔振系统模型;基于OTPA方法,分析振动传递路径,确定主动悬置布置方案;建立液压悬置集总参数模型和参数估算模型,分析液压悬置动特性;设计新型电磁作动器,构建集总参数模型,与液压悬置进行集成,建立发动机主动悬置CAD&CAE(计算机辅助设计和计算机辅助工程)模型,进行仿真计算,优化结构参数,试制样机;研究PID控制、滑模控制、自适应控制等不同控制方法的差异,综合考虑三缸发动机激励特性、控制难易程度、制造成本和稳态、瞬态工况隔振需求等因素,制定控制策略,确定控制目标,设计控制算法,编写控制程序,使之满足三缸直列发动机不同工况下的隔振性能要求;使用MicroAutobox开发控制原型,进行主动悬置台架实验,调校控制器参数,将主动悬置装车进行整车实验。
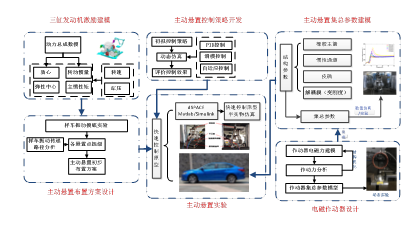 图1.1 技术路线
图1.1 技术路线
1.4达到的效果和成果技术水平
(1)研究了三缸发动机激励特性,建立了曲柄-连杆-活塞机构多体动力学模型,推导三缸发动机振动激励的理论表达式。
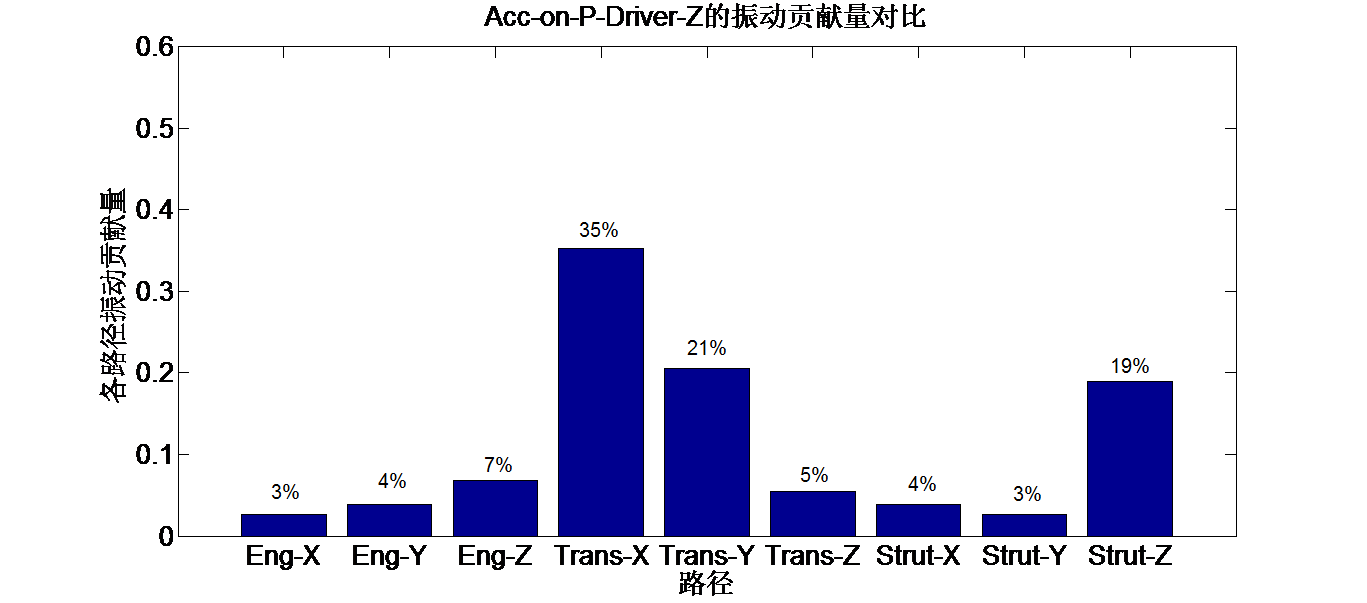
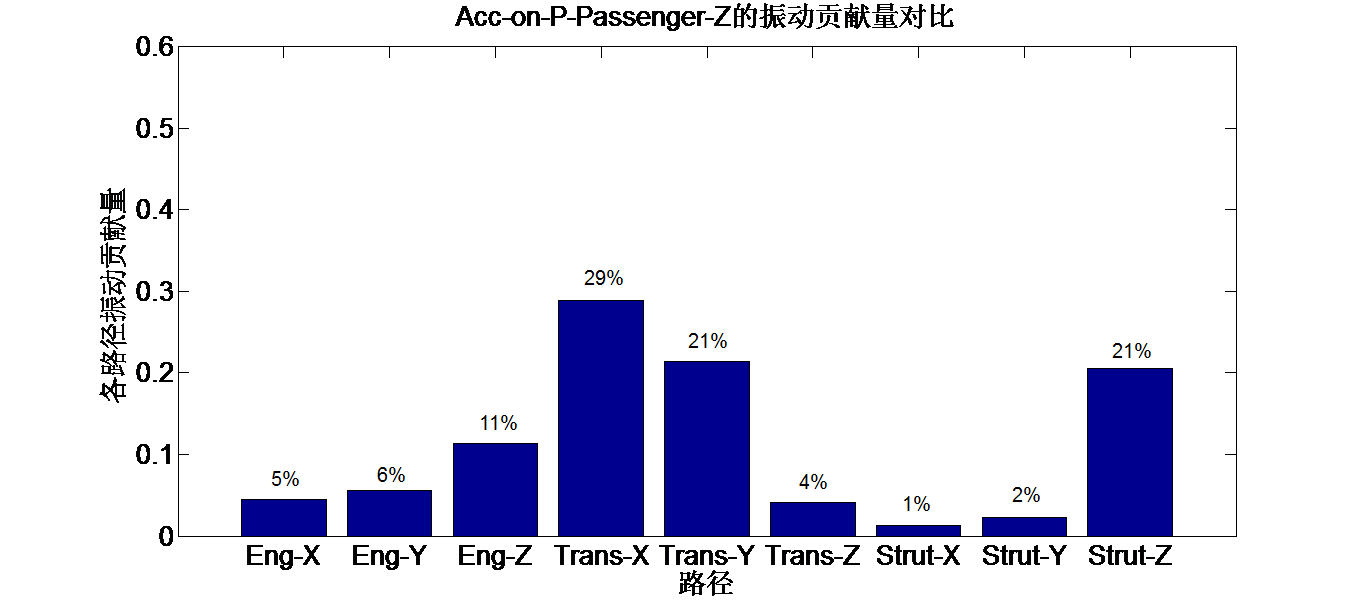
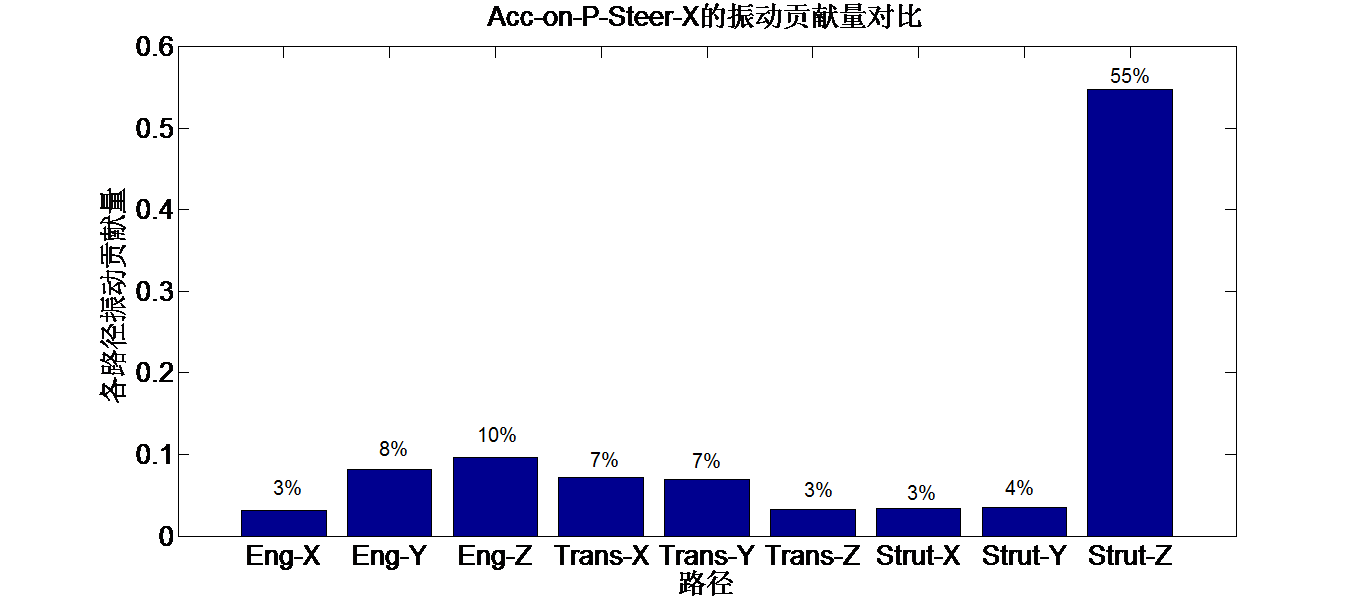
(2)进行了样车振动实验,预设振动传递路径为三个悬置点的三个方向,共9条路径,响应点为车内主副驾座椅和方向盘,如图1.2所示。基于OTPA方法,分别计算各悬置点、各个方向的各条振动传递路径对车内响应点的振动贡献量,其最终结果如图1.3所示,而车内座椅的振动贡献主要来自变速箱一侧的橡胶悬置,因此得出结论主动悬置须安装与变速箱一侧。
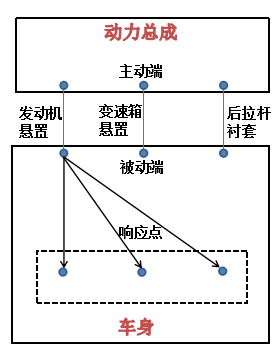 图1.2 传递路径预设
图1.2 传递路径预设
 (a) 主驾座椅
(a) 主驾座椅
 (b) 副驾座椅
(b) 副驾座椅
 (c) 方向盘
(c) 方向盘
图1.3 每条路径的振动贡献量百分比
(3)根据液压悬置工作原理,建立了如图1.4所示的液压悬置集总参数模型,其中由于解耦膜被固定在金属笼中,解耦膜刚度Kd在大变形下具有非线性特性,该特性对液压悬置动特性具有显著影响。因此,考虑解耦膜变刚度特性,建立了液压悬置非线性集总参数模型。
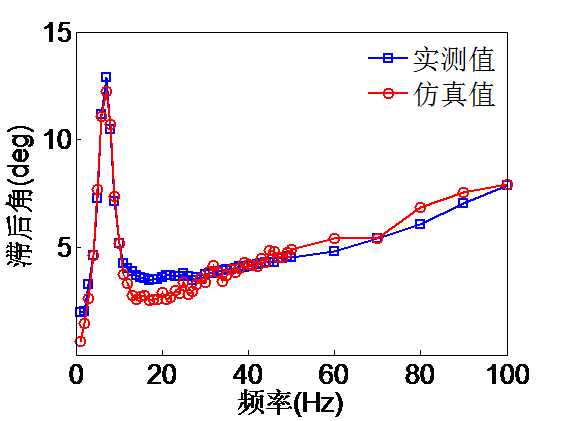
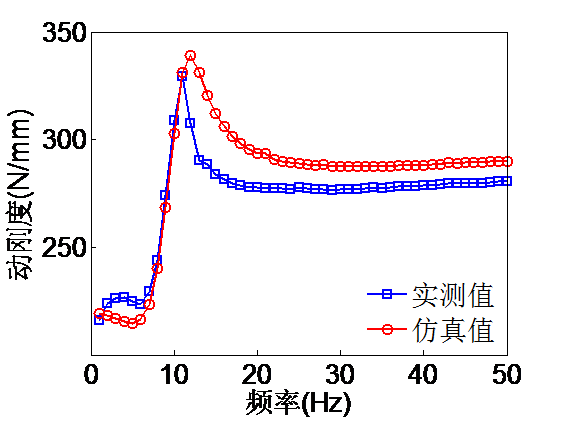
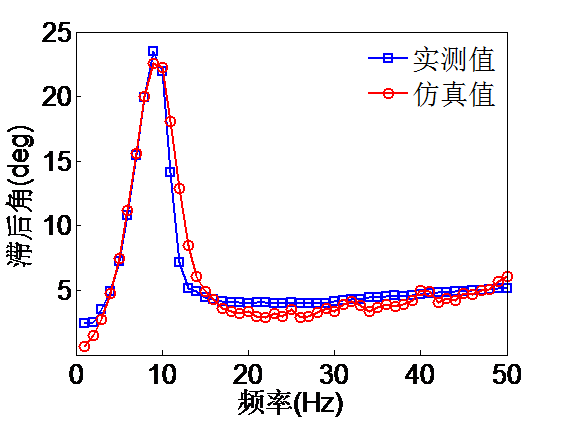
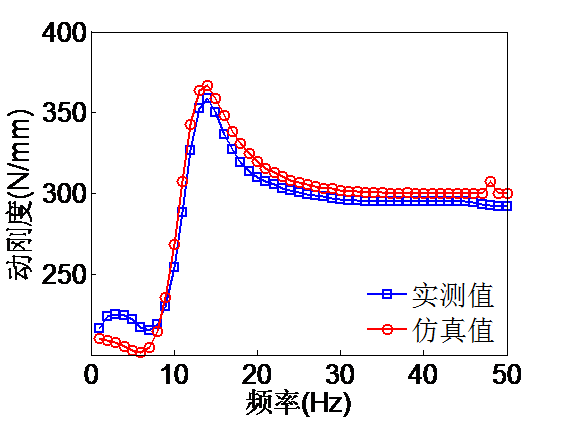
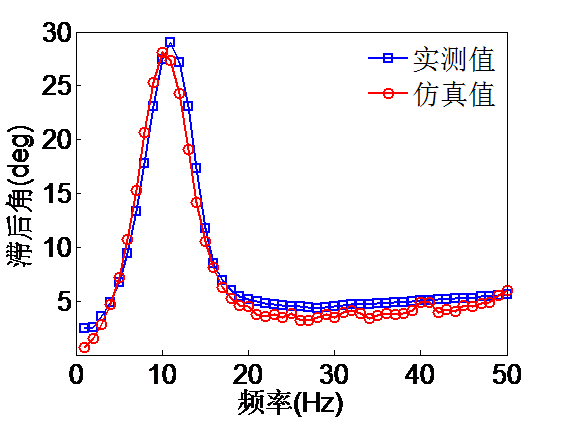
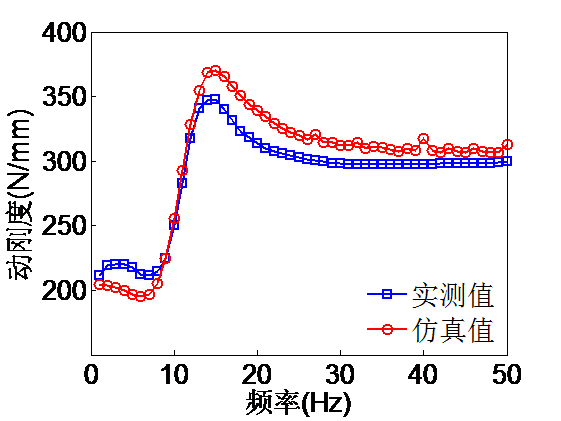
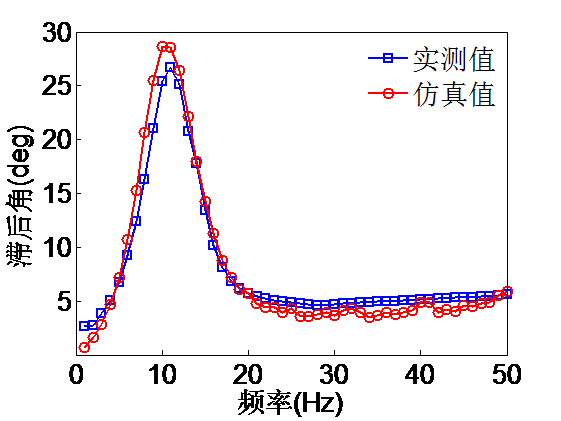
为了快速预测液压悬置动态特性,使用神经网络和流体力学方法建立了各集总参数的估算模型,仅通过关键结构参数就能计算出集总参数,进而预测悬置动特性。根据该模型可以计算预测被动悬置动刚度与滞后角,与测试相比较,仿真和实测动特性对比如图1.5所示,说明建立的模型可以准确、快速预测悬置动特性。
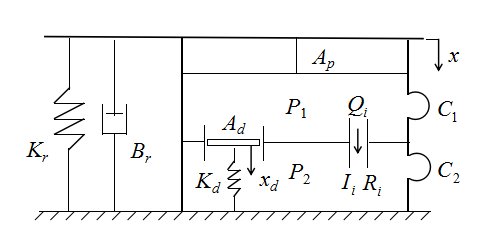 图1.4固定解耦式液压悬置集总参数模型
图1.4固定解耦式液压悬置集总参数模型
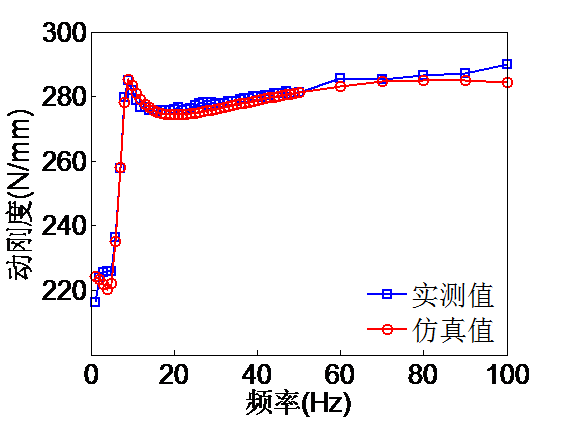
(a) PP0.1mm动刚度? ??????????????????????????????????????? ???? (b) PP0.1mm滞后角
(c) PP0.3mm动刚度???????????????????????????????? ?????????? (d) PP0.3mm滞后角
(e) PP0.6mm动刚度?????????????????????????????????? ??????? (f) PP0.6mm滞后角
(g) PP1.0mm动刚度??????????????????????????????????? ????????? (h) PP1.0mm滞后角
图1.5 某固定解耦式液压悬置动态特性
(3)根据三缸发动机的隔振需求,设计了一种具有高比功率的主动悬置作动器。不同于常见的动圈式作动器,本设计以线圈和磁轭为定子,永磁体为动子,其结构如图1.6所示,包括安装在主动悬置支架上的电磁作动器上外壳5以及电磁作动器下外壳9,作动器上外壳5、线圈上磁轭6、线圈7、线圈下磁轭8与电磁作动器下外壳9串联在一起,且通过螺栓紧固连接,动子上盖板10、上铁片11、上永磁体12、中铁块13、下永磁体14、下铁片15以及动子下盖板17串联在一起,且通过推杆4与锁止螺母16紧固连接在一起作为电磁作动器的动子部分,推杆4与镶嵌在被动液压悬置解耦膜1内的金属嵌件3螺纹紧固连接,从而将作动力传递至被动液压悬置。
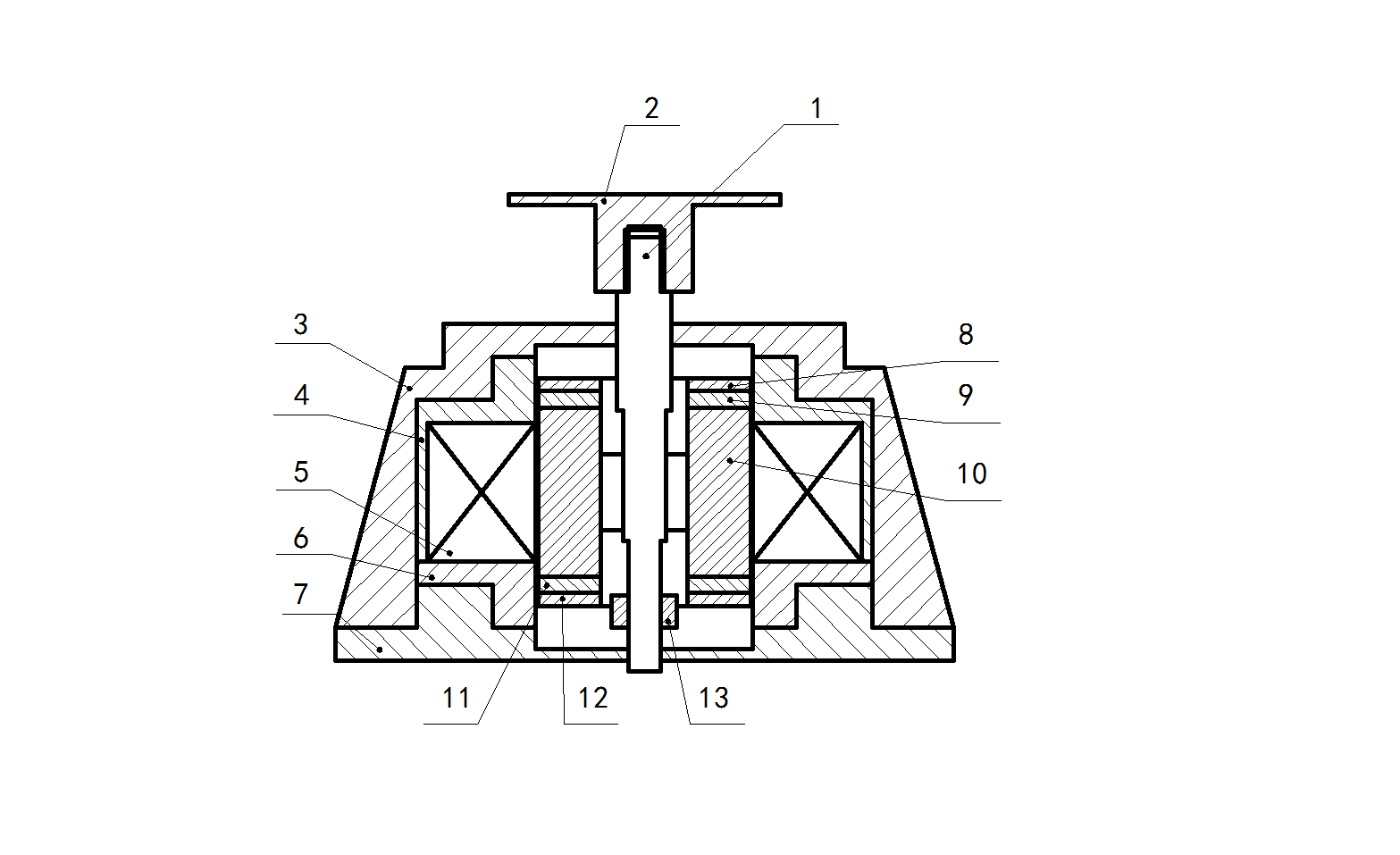 图1.6 电磁作动器结构剖视图
图1.6 电磁作动器结构剖视图
使用电磁有限元软件Jmag分析电磁作动器作动力,结果如图1.7所示,在1A电流输入下能达到10N以上,满足输出需求,同时该作动器结构紧凑,体积较小,满足“高比功率”、“大输出力”的设计需求。
将作动器现有液压悬置进行集成,集成后的主动悬置数模和试制的实物如图1.8所示,该主动悬置结构基于现有的解耦膜式液压悬置,其中解耦膜、皮碗、外壳等等部件进行了优化已避免干涉并满足隔振性能要求。
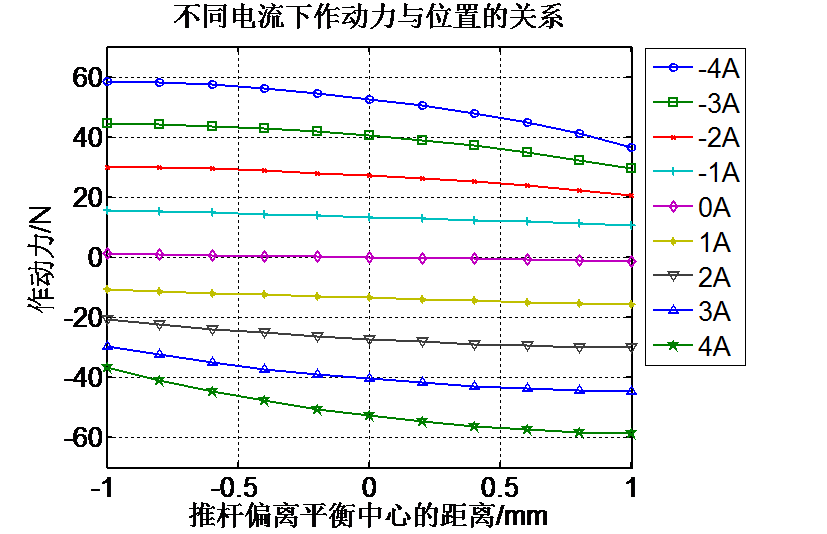
图1.7 电磁作动器作动力变化曲线图
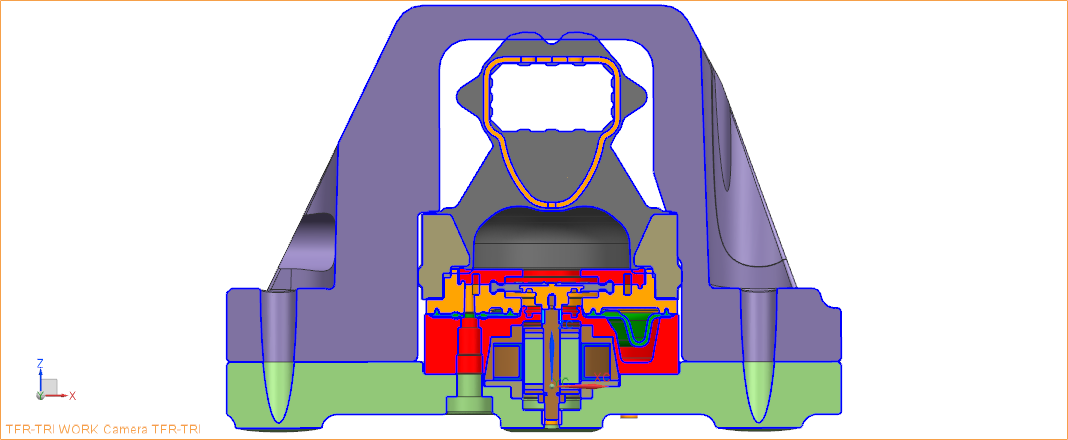
?(a)主动悬置截面图
 ?(b)主动悬置实物图
?(b)主动悬置实物图
图1.8 主动悬置样件
(4)使用离线仿真的方法对比了鲁棒PID控制、滑模控制和自适应前馈控制,综合对比发现:自适应前馈控制策略仅需要振动阶次、发动机转速和车身加速度输入,且具有计算复杂度低、实时性好的优点,因此,本研究采用自适应前馈控制策略,设计了窄带FXLMS算法。稳态工况和瞬态工况下的仿真结果如图1.9与1.10所示,使用FXLMS算法后车身加速度得到了明显抑制。
(a)1000rpm?????????????????????????????????????????? ???????????????????? (b)4000rpm
图1.9稳态工况PID控制仿真结果
(a)控制前???????????????????????????????????????????????????????? ????????????? (b)控制后
图1.10瞬态工况PID控制仿真结果
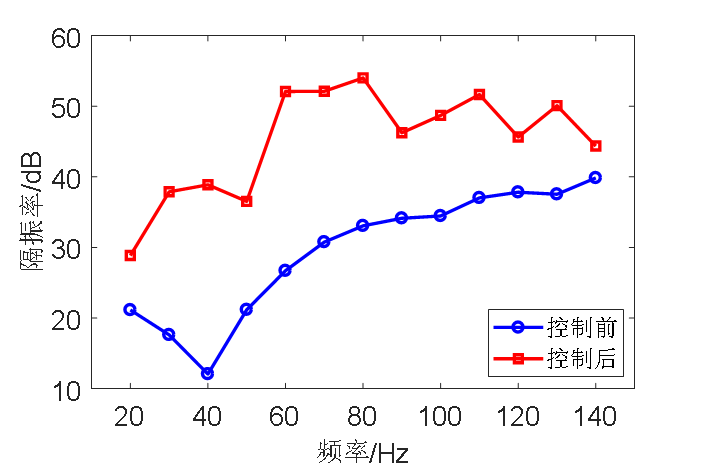
(5)为验证主动悬置及控制策略,先进行了主动悬置的台架试验。台架试验布置和等效的单自由度模型如图1.11所示,在悬置底部加装了一套柔性钣金件,用于模拟悬置实际安装在车身上的状态,使用MTS台架上自带的力传感器测量悬置传递到底座的传递力,使用加速度传感器测量悬置主、被动端振动加速度并计算悬置隔振率,用于评价主动隔振的效果。通过MTS831试验台施加了20Hz到140Hz的多个单频激励工况,进行了多组主动悬置台架测试。
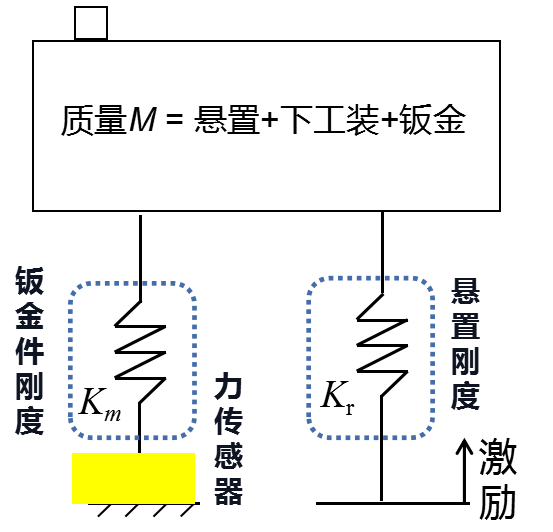 (a)等效模型
(a)等效模型
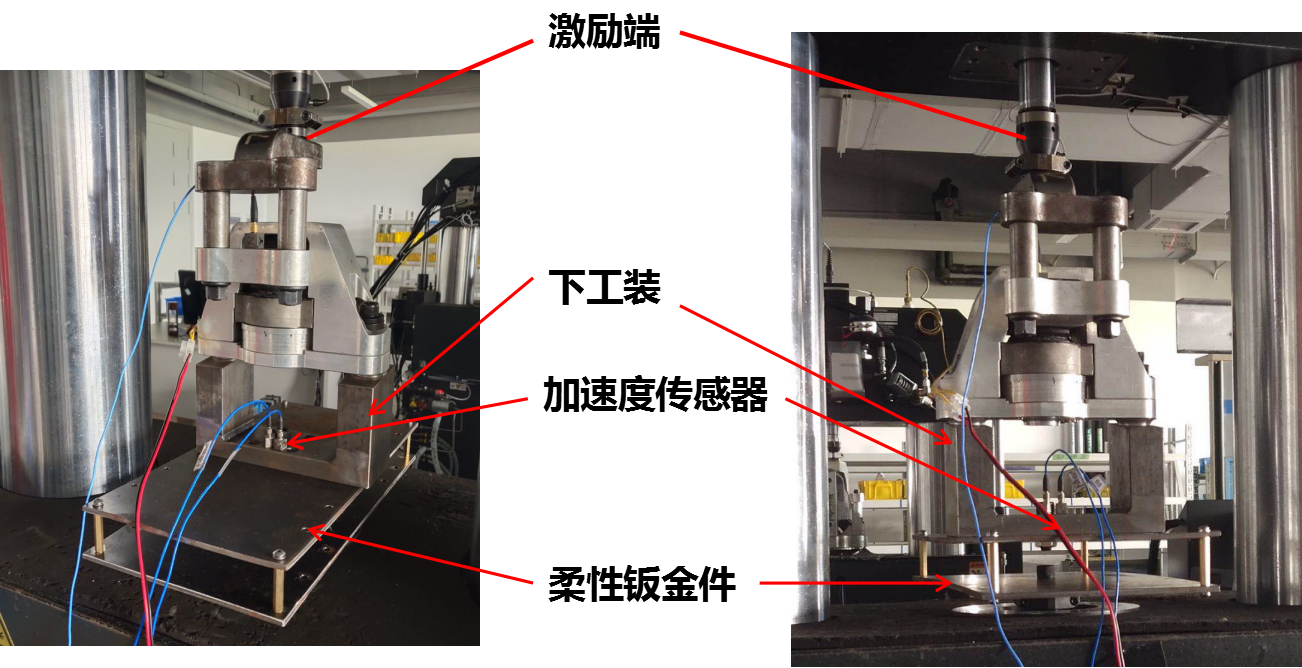 (b)实际布置
(b)实际布置
图1.11 主动悬置试验台架
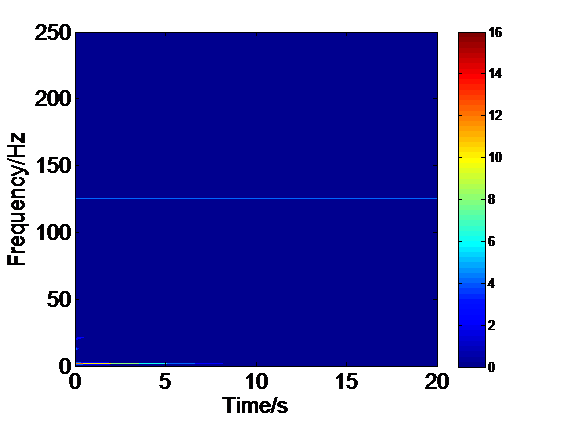
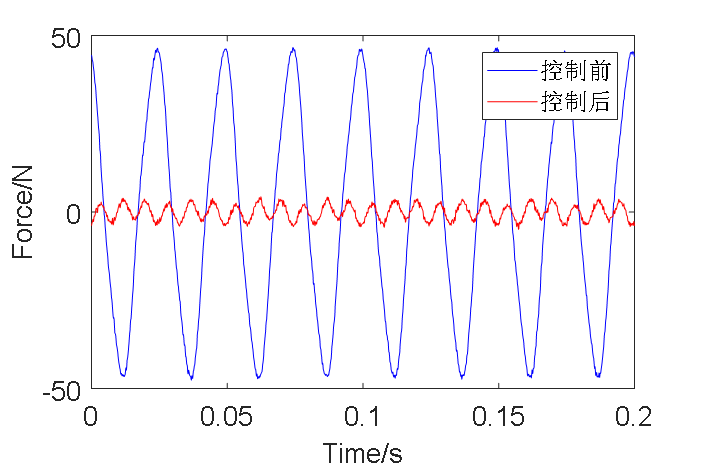
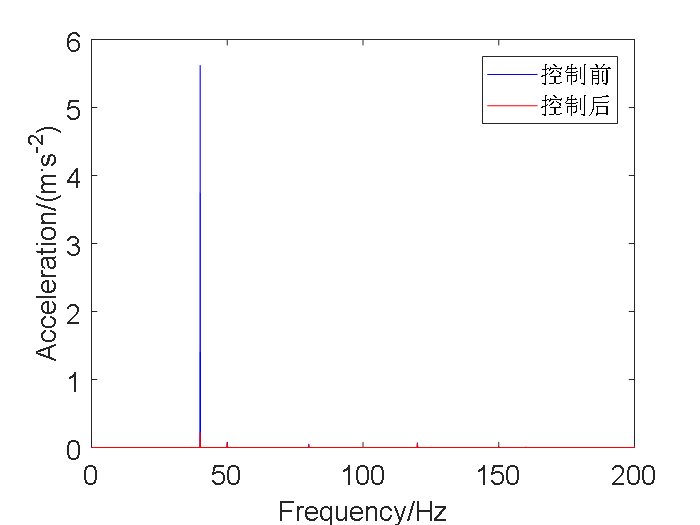
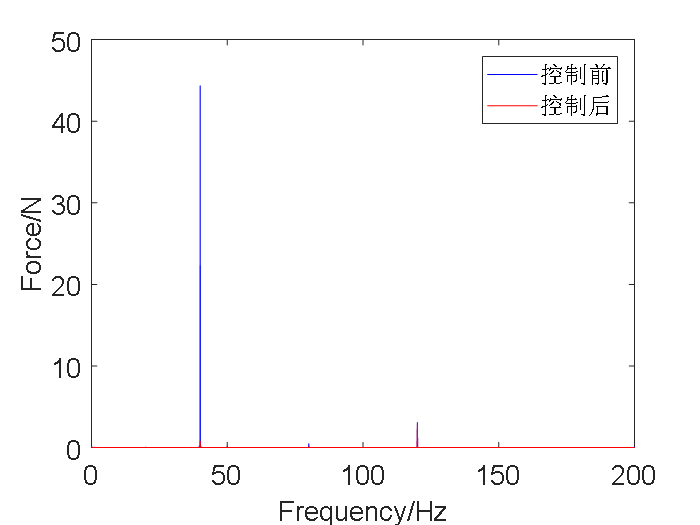
主动悬置的隔振控制效果,以40Hz激励工况为例,如图1.12所示,加速度和力信号幅值在控制后都下降到十分之一以内,信号频谱如图1.13所示,40Hz激励产生的振动几乎被完全消除。其余工况的隔振率和振动传递力如图1.14所示,隔振率均子啊20dB以上,传递力衰减都在10dB以上。
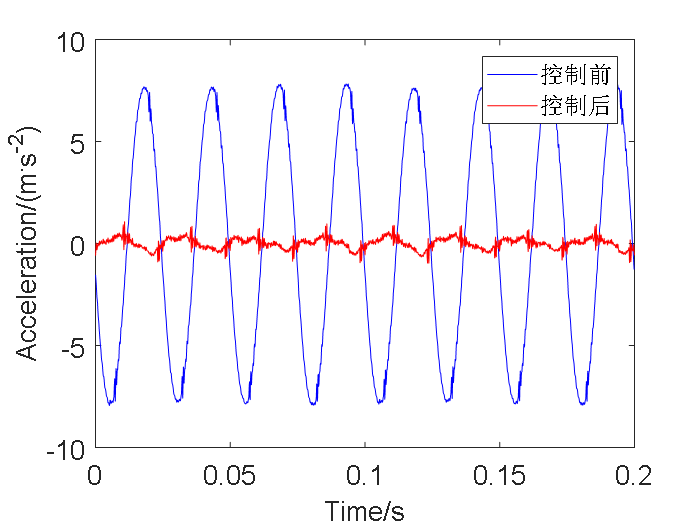
(a)被动端加速度
 (b)MTS力信号
(b)MTS力信号
图1.12 40Hz激励主动控制稳定后时域信号
(a)被动端加速度
 ?(b)MTS力信号
?(b)MTS力信号
图1.13 40Hz激励主动控制稳定后频域信号
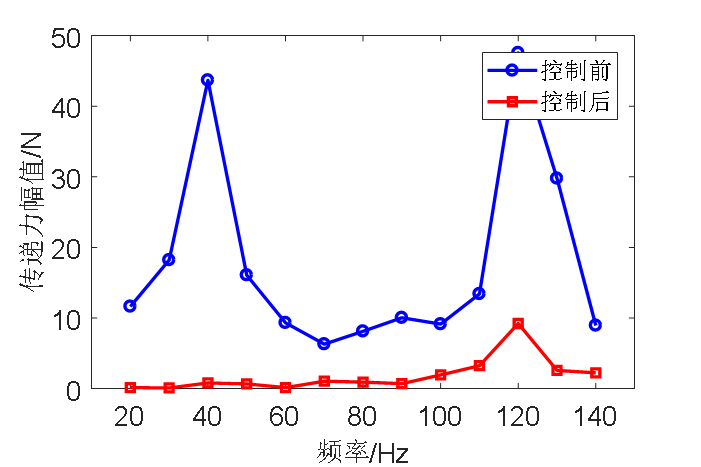
(a)传递力
 (b)隔振率
(b)隔振率
图1.14 主动悬置减振量
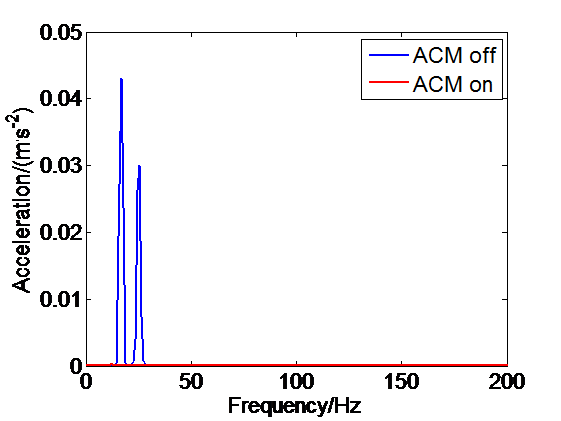
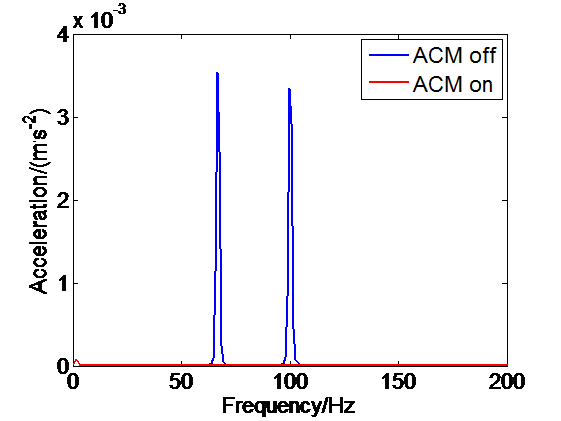
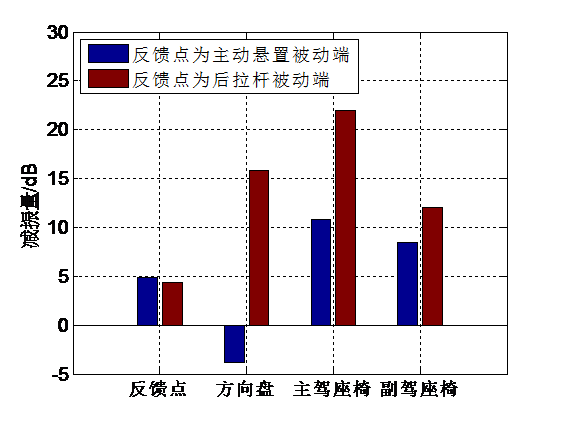
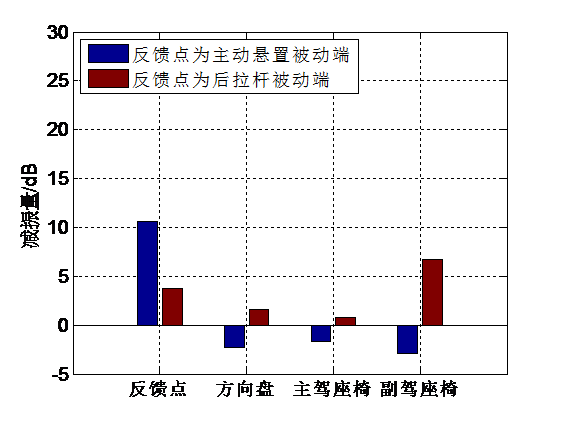
(5)将主动悬置装车并进行实车验证,实验设置如图1.15,考虑实验成本限制,仅在动力总成变速器侧安装一个主动悬置,作为误差传感器的振动加速度传感器可以安装于悬置被动端(车身)或后拉杆被动端(副车架)的z向,设置工况为怠速、空调关闭、P档,实测的减振量如图1.16所示,证实主动悬置具有优异的减振效果,且误差传感器布置在副车架z向能有更好的减振效果。

图1.15 主动悬置整车实验设置
?(a)1阶
 (b)1.5阶
(b)1.5阶
图1.16 主动悬置减振量
2、技术创新点
建立了考虑解耦膜变刚度的液压悬置集总参数模型和参数估算模型,可在仅提供关键结构参数的情况下快速识别出液压悬置集总参数并预测其动态特性,为主动悬置设计、优化提供了依据。
研制了一种新型的电磁作动器,具有体积小、结构紧凑、比功率高、低摩擦的特点。并将作动器和传统液压悬置集成,考虑动子和定子之间的摩擦建立了非线性集总参数模型。设计了参数识别实验和动态性能验证实验,可以识别主动悬置集总参数特性。
使用离线仿真的方式对比了三种控制方法的隔振性能,基于Simulink开发了主动悬置自适应前馈控制策略,使用在线识别次级通路的窄带FXLMS算法进行了主动悬置台架实验和整车实验,有效降低了三缸发动机1阶振动。
3、专利/获奖情况
申请发明专利:
安一领,阎礁,黄小飞,彭明. 电磁作动式主动悬置装置、电磁作动器、汽车及控制方法[P]. 上海市:CN111516448A,2020-08-11.
]]>