基于“车路云”一体化系统的车云融合关键技术研究
Research on key technologies of vehicle-cloud integration based on the vehicle-road-cloud integrated system
项目研制单位:智能汽车创新发展平台(上海)有限公司 、同济大学
主要研制人员:平台公司(陈天桢、黄剑其、窦瑞、周剑鸣、宋理清、邵亚萌)、同济大学(魏忠祥、王新红、迟会聪、周志熠、周扬)
1、研究内容介绍
- 研究的目的与意义
近年来,我国积极布局并大力发展车路一体交通系统。2016年7月,国家发展改革委和交通运输部联合发布《推进“互联网+”便捷交通促进智能交通发展的实施方案》,从构建智能运行管理系统、加强智能交通基础设施、实施“互联网+”交通示范项目全面阐述了汽车产业转型升级的重要方向,提出了车联网与自动驾驶的技术创新发展趋势。2017年“十九大”将建设交通强国做为我国重要战略目标,国家发改委将“云控基础平台”作为产业融合发展公司的重点产业化对象,将“智能汽车大数据云控应用系统”作为信息基础设施网络服务公司的重点建设对象。
“车路云”一体化系统将是智能汽车与数字化道路、5G通信、云计算、边缘计算技术深度融合的产物,是汽车工业新四化的集中体现,可极大拓展车辆的智能化水平和车辆的驾乘安全性,赋予汽车工业新的生命力,提升现代城市的智慧交通水平。 基于“车路云”一体化系统与标准化通信协议,可实现物理空间与信息空间中的车、交通、环境等要素相互映射。通过两者之间的标准交互、高效协同,利用云计算大数据能力,解决系统性的资源优化与配置问题,促进人车路运行按需响应、快速迭代、动态优化,最终实现协同式无人驾驶。
目前较为成熟的车路协同技术一般基于V2X设备(例如RSU和OBU),完成路侧与车端、车端与车端子系统之间的通信工作,支持传输的内容包括目标检测结果、硬件设备信息、车-路或绝对-相对坐标系转换矩阵等。但该模式需要同时满足路侧RSU设备的规模化部署和车辆OBU设备加装,难以推广应用。因此,面向“车路云”一体化系统技术需求,有必要构建基于5G网络的的可信可靠的动静态信息交换机制,对5G MEC网络的车-路-云的数据交互在时延、掉包率、信干噪比等关键性能指标开展测试。基于测试结果,结合第三方运营商可支持技术以及5G通信技术发展趋势,形成适用于“车路云”一体化系统的5G MEC专网优化与建设方案。
- 要解决的关键技术
本项目紧跟智能汽车创新发展战略,针对“车路云”一体化系统的建设需求,针对智能汽车与数字化道路、5G通信、云/边缘计算等关键技术,研究“车路云”一体化系统的车路云融合关键技术及标准,要解决的关键技术如下:
1)整合平台公司的路侧感知系统、低时延边缘云平台、同济的车端测试系统,构建面向5G专网的车路云一体化数据交互系统。
2)研究并提出“车路云”系统的时间同步和空间对齐方案,实现基于5G MEC网络的车端、路端和云端实时信息交换;
3)聚焦5G MEC通信环境,面向车路云一体化项目需求,搭建“车路云”一体化平台的测试验证环境,开发网络性能测试工具。针对车路云信息交互的低时延、高可靠性要求,设计测试验证方案;
4)基于嘉定开放道路,测试不同车速、基站负载、数据包大小情况下的通信时延、抖动等关键性能指标。
5)依据测试结果与理论分析,提出适用于车路云一体化系统的网络优化建议和专网方案。
6)形成关于“时空同步”与“交通信号数据推送”团标,为面向智能驾驶的车路云一体化系统规划与建设提供规范。
- 采取的路线和方法
如图1所示,本项目的技术路线简述如下。
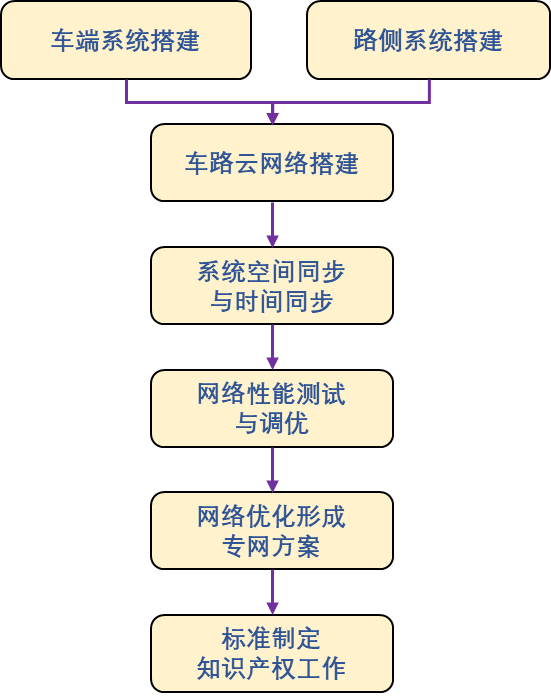
图 1 项目技术路线图
1)车路云一体化系统测试验证环境设计及搭建
车路云一体化系统测试验证环境囊括路侧实时感知系统、低时延边缘云平台、车端测试系统。基于同济的车载计算设备和平台公司的路侧设备、云端系统及网络环境,搭建车路云一体化数据交互系统,基于5G网络实现路侧感知数据、信号灯数据、车辆行驶数据的数据交互。在无线侧,使用5G Uu接口建立车辆、路侧与基站的通信链路;在核心网侧,使用专网等技术提高数据从基站到云端设备的通信效率。
2)车路云一体化系统的时间同步方案
针对搭建的车路云一体化系统,探索车辆、云端、路侧的时间同步及空间同步方案。在时间维度上,车路云设备部署在不同位置,受限于硬件固有原因,各设备间时钟有所不同,需要通过同步授时、同步触发等方式同步各设备至系统时钟,降低因时间不同导致的路侧感知数据、信号灯数据、车辆行驶数据的更新延迟。
3)车路云一体化系统的空间同步方案
在“车路云”一体化系统中,车载子系统是移动的,路侧子系统部署于不同位置。为实现不同设备数据的融合处理,在空间维度上,将路侧感知数据中被检测物的基于感知源的相对位置转换到绝对坐标系中的绝对位置,与车辆GPS数据统一于同一坐标系下,实现车路云设备间的空间同步。
4)车路云一体化系统网络性能测试
针对搭建的车路云一体化系统,开发网络通信性能测试工具。通过测试数据交互过程中的各环节对通信时延的影响,探究基于5G Uu接口的车路云一体化系统是否能满足智能驾驶不同应用或场景的性能要求,并基于测试结果对数据交互环节进行调优。
5)车路云一体化系统网络优化建议与专网方案
依据测试分析报告,由同济团队分析形成网络优化建议,平台公司与网络运营商衡量可执行度。网络优化与网络测试交替进行,基于测试与试验结果,比较基于PC5与Uu接口通信在时延、抖动、可靠性等关键指标性能,形成基于5G Uu接口及5G专网的车路云一体化组网优化方案。
6)车路云数据传输优化方案
TCP容易发生队头阻塞,传输效率低下。本项目结合TCP传输的可靠性和UDP传输的高效性,提出了MQTT Over QUIC的车路云数据传输优化方案,实现了一种无队头阻塞的多路数据流并行传输方案,极大的提高了传输效率,并保证了可靠性和安全性。
7)标准制定及知识产权相关工作
整合项目中的研究内容,针对项目中的时间同步、空间同步、网络搭建与策划等内容,形成行业标准和相关技术成果,为该方案的全国推广提供理论依据和实验数据。针对项目中的创新项,进行专利申请等工作。
- 达到的效果和成果技术水平
面向车路云一体化建设需求,项目搭建了囊括车端测试系统、路侧实时感知系统、低时延边缘云平台测试验证平台。利用5G Uu建立车辆、路侧与基站的无线通信链路,在核心网侧使用5G专网技术提高数据从基站到云端设备的通信效率,基于我国广泛部署5G基站、成熟商用的5G系统,形成了“易推广”、“低成本”的车路云一体化融合机制。针对搭建的车路云一体化系统,设计了车辆、云端、路侧的时间同步及空间同步方案,形成了基于5G Uu口的动静态数据实时交互方案。
项目针对车路云一体化网络开发了通信性能测试工具,测试了基于5G Uu口的数据端到端交互时延。基于嘉定开放测试道路,对不同基站负载、不同车速、不同数据包长度下的端到端时延、抖动等关键性能指标开展测试,基于测试结果对数据交互环节进行调优。通过对测试结果分析,发现了嘉定片区测试站点的网络覆盖较差(SINR值低于典型城镇环境值)、存在越区切换的乒乓效应、车辆接入时延较大等问题。经与平台公司、移动运营商三方讨论,结合5G通信系统技术发展趋势,提出了适用于车路云一体化系统的5G MEC专网建设与优化方案。在第三方运营商可支持条件下,已完成无线侧调优(部署新基站)、接入预调度、UPF下沉技术,可有效降低10ms-15ms端到端时延。项目为车路云一体化建设提供了有价值的指导方针,车路云一体化方案融合了Uu口、MEC、UPF等5G关键技术,在面向车路云一体化的5G MEC组网方面给出了世界先进的解决方案,端到端时延达到国际领先、国内先进的水平。
2、技术创新点
有别于传统的PC5 V2X方案,本项目以“成本精益化”、“可复制推广”为核心理念,设计基于5G Uu口的车路云一体化数据交互系统,探究基于5G Uu、MEC等核心技术的车路云一体化大规模、可推广方案。以实地、实验的形式测试车路云一体化系统的时延、抖动、丢包率等关键性能指标,研究车路云一体化系统的数据交互可靠性和实时性。
基于可行性分析以及验证结果,依据5G R14至R18协议及技术发展趋势,形成囊括接入网、承载网、核心网的端到端网络优化建议。以无线侧基站覆盖优化、无线测RB资源预留、主动式上行预调度、UPF下沉、端到端网络切片、C-V2X多播传输、C-V2X多天线波束成形为主要核心技术,提出适用于车路云一体化系统专网建设方案。
通过将MQTT与QUIC相结合,为车路数据传输提供了以下几个方面的优化:
1)降低延迟:传统的MQTT over TCP需要先进行TCP握手,再进行TLS握手,这会导致延迟。QUIC将传输和TLS握手整合为一步,能够更快地建立MQTT连接。
2)无队头阻塞的多路复用:QUIC支持在单个连接上进行多路复用,确保每个数据流都是独立的。这对于同时处理多个主题或消息流的MQTT非常有益。
3)在网络不稳定的情况下表现更好:QUIC的设计能比TCP更好地处理数据包丢失和网络变化,可以提供更稳定的连接。
4)内置安全性:QUIC默认集成了与TLS等效的安全功能。这意味着MQTT over QUIC始终具备加密和认证功能,无需额外的配置。
5)连接迁移:QUIC能够无缝地应对客户端IP地址或端口的变化,而无需重新建立连接。
3、专利/论文/获奖情况(注明专利名称、专利号/论文名称、录用情况/获奖名称、获奖等级。
中国专利:《一种基于标识映射的车联网密钥管理实现系统及实现方法》,专利申请号:202311312116.4。设计一种基于标识映射的车联网密钥管理实现系统及实现方法,减少证书传递造成的通信开销,提高标识密码算法运算效率,且兼容于车联网PKI体系。
4、成果应用及经济效益(量化)
不同于传统的PC5 V2X车联网方案,本项目主要研究基于5G Uu口的车路云一体化系统。基于我国已广泛部署、大规模商用的5G基站,利用5G网络低延时、高可靠传输优点,建立基于5G Uu接口的“车路云”一体化网络。研究并提出“车路云”系统的时间同步和空间对齐方案,实现基于5G MEC网络的车端、路端和云端实时信息交换;
聚焦5G MEC通信环境,面向车路云一体化项目需求,搭建“车路云”一体化平台的测试验证环境,开发网络性能测试工具。针对信息交互的实时性、可靠性要求,设计测试验证方案;基于嘉定开放道路,测试不同车速、基站负载、数据包大小情况下的通信时延、抖动等关键性能指标。车速20-40km/h下平均单程时延26ms,基站高负载(早晚高峰)时延39.7ms。通过优化云服务器订阅模式,长数据包平均时延为44.4ms。
针对测试结果,同济、平台公司、移动三方讨论,依据5G R15至R18协议及技术发展趋势,并结合移动运营商可支持技术方案,形成囊括接入网、承载网、核心网的端到端网络优化与建设方案。平台公司牵头形成关于“时空同步”、“交通信号数据推送”团标两份,可指导面向智能驾驶的车路云一体化系统规划与建设。
项目旨在为我国智能交通系统、智能车联网的建设和推广提供新的技术方案和标准。对项目参与单位而言,项目旨在提高平台公司在车路云一体化系统的技术储备和评价水平,并建立网络性能评价方案和标准,为平台公司提供有效的5G网络搭建模板和性能参数。研究结果对平台公司牵头的智能汽车车路协同“上海方案”提供关键试验参数及标准支持,提升公司的行业竞争力。此外,基于我国广泛部署并成熟商用的5G基站,促进5G基站、MEC、云平台等技术的深度融合,拓宽5G网络在智能车联的应用方向。车端也可以避免车辆OBU设备加装,降低设备的部署成本,为车路协同网络的建设提供经济效益更高的方案。以此为基础,可以进一步开发基于“车路云”网络的云端应用,如数字孪生、高精度地图、交通动态规划、事故预警等应用,为进一步开发车联网的应用提供借鉴与参考。
]]>面向港区物流场景的群体协同式绿色控制系统研究
Research on Group Collaborative Green Control System for Logistics Scenarios in Port Areas
项目研制单位:同济大学、上海友道智途科技有限公司
主要研制人员:胡笳、许正昊、高炳钊、洪金龙、安连华、李俊琦、李泓辰、孙凯、罗熙
主题词:自动化码头,自动驾驶,车队调度,绿色节能驾驶
1、研究内容介绍
1.1 研究目的和意义
在全球经济一体化快速发展的今天,作为全球运输网络中最重要的节点,港口对区域经济的发展至关重要。近年以来,随着国家和地方出台的一系列扶持政策,沿海城市的港口物流发展进入了快车道,如上海港、宁波舟山港更是跻身全球港口吞吐量前三。
然而港口物流“量”的提升并不意味着“质”的提升,根据《中国港口物流行业市场前瞻与投资战略规划分析报告》,港口物流行业总的来说有以下三大问题:1)运输效率低,由于缺乏对港口集卡车队的综合调度管理,导致空车运输多、运输路线重复;2)运输成本高,港口运输过程中,人工调度决策指派车辆,为避免装卸设备空闲、投入过多运输车辆,一方面浪费运力资源,另一方面造成车辆频繁冲突、启停,造成能耗增加。此外,车辆缺乏应对港区复杂运输环境(坡度、人类车干扰)的能力,驾驶节能性差,造成能耗成本增加。上述问题严重影响了我国港口物流行业的发展,因此亟需一种新的技术形态整合运输资源、提升装卸效率,突破港口的发展瓶颈。
作为交通运输系统的最新发展方向,蓬勃发展的自动驾驶和5G通信技术极大地拓展了运载工具和道路基础设施的信息获取与交互手段,为提升港口的智能化和无人化水平提供了可能。通过利用智能集卡精准可控优势,开发群体协同式绿色控制系统,通过车车协同调度作业技术可以提高作业效率,通过车辆绿色驾驶控制可以节约能耗、降低成本,助力港区运输经济发展。
1.2 研究内容和技术方案
面向港区物流运输现实需求,设置研究内容如下:
1)面向港区物流的群体协同机制设计与机理解析
2)面向港区运输需求的车辆全域集群决策方法
3)面向港区全链运输效能的车辆节能绿色驾驶控制方法
- 面向港区场景的群体协同式绿色控制算法测试与验证
根据研究内容,项目技术方案分为“现状调研-理论研究-算法开发与集成-数值模拟验证-硬件在环仿真验证-实车测试验证-影子模式落地运营”八个步骤递进展开研究。
1.3 达到的效果和成果技术水平
(1)形成运输作业需求驱动下集卡集群调度决策技术,达到国际领先水平;
提出港区集群调度高效实时调度框架如图 1所示。运输任务调度模块以最大化港口作业效率为目标,为所有集卡分配运输作业任务;多车路径调整模块考虑港区内部路网时空资源分布,为车队集群规划合理的运输路径,最后协同速度规划模块关注更为微观的集卡运输速度,从而生成精确到时间的路径时空经由点,提高执行精准度的同时保证运输安全性。
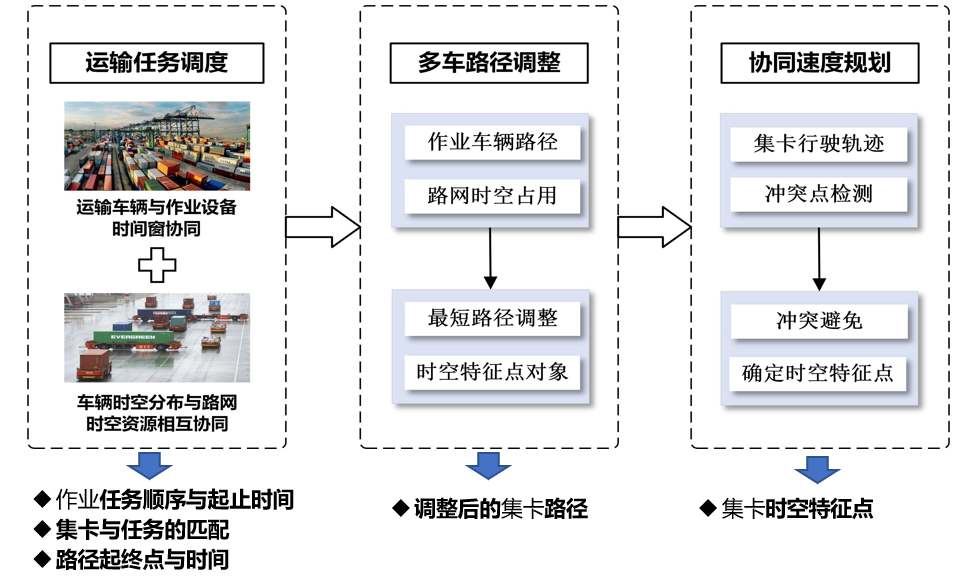 图 1港区集群调度协同决策机制框架
图 1港区集群调度协同决策机制框架
针对调度技术的仿真测试显示,所提出的调度决策技术可有效降低集卡之间的冲突至2%以下,缩短集装箱装卸时间最高可达30%。通过测试验证说明,本技术在提升港口作业效率,降低运输能耗以及提升集卡运输安全性上具有显著的提升。
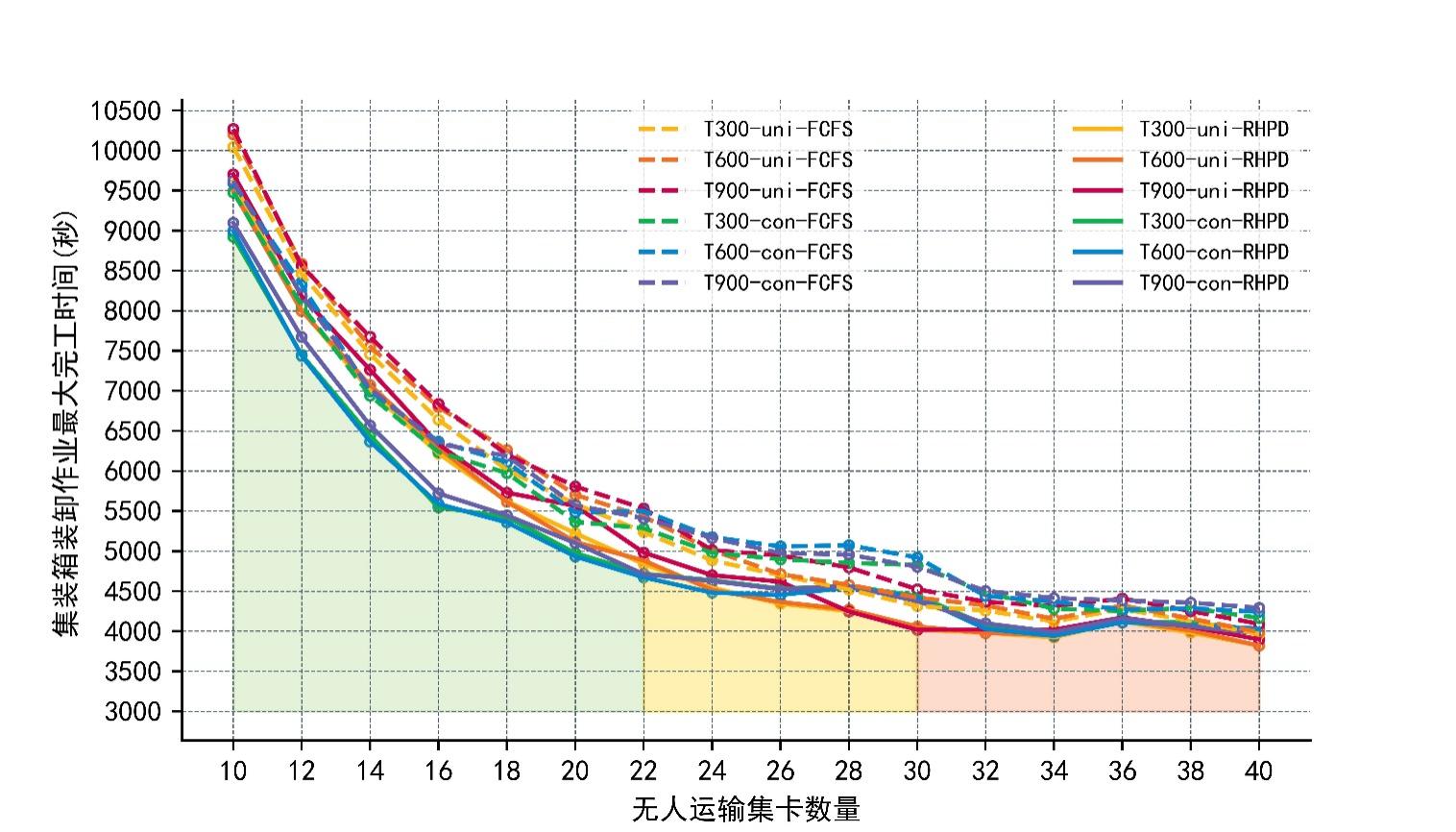 (a)完工时间
(a)完工时间
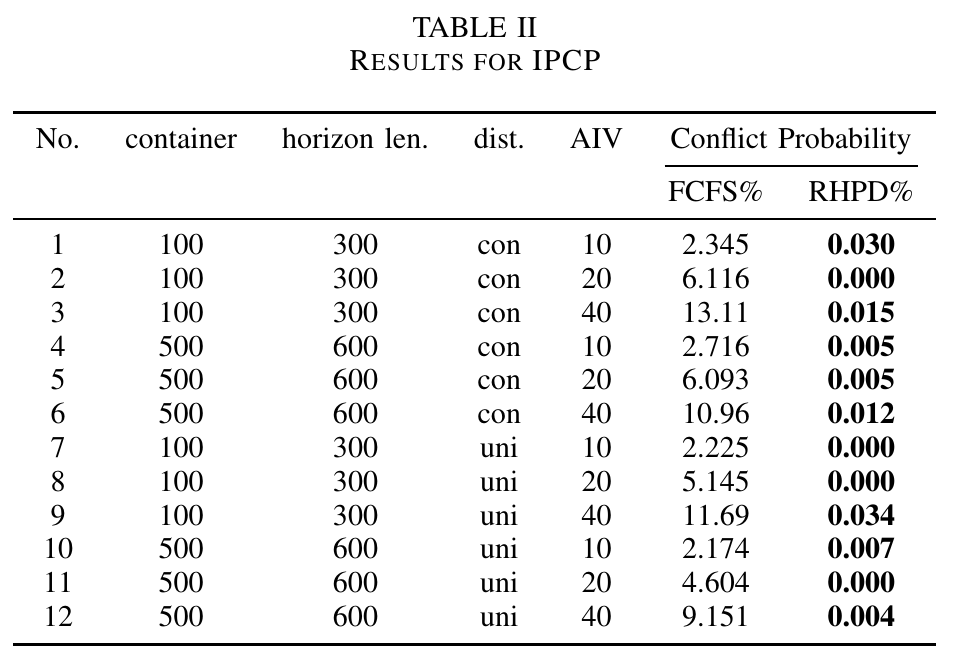 (b)冲突概率
(b)冲突概率
图 2集群调度算法仿真测试结果
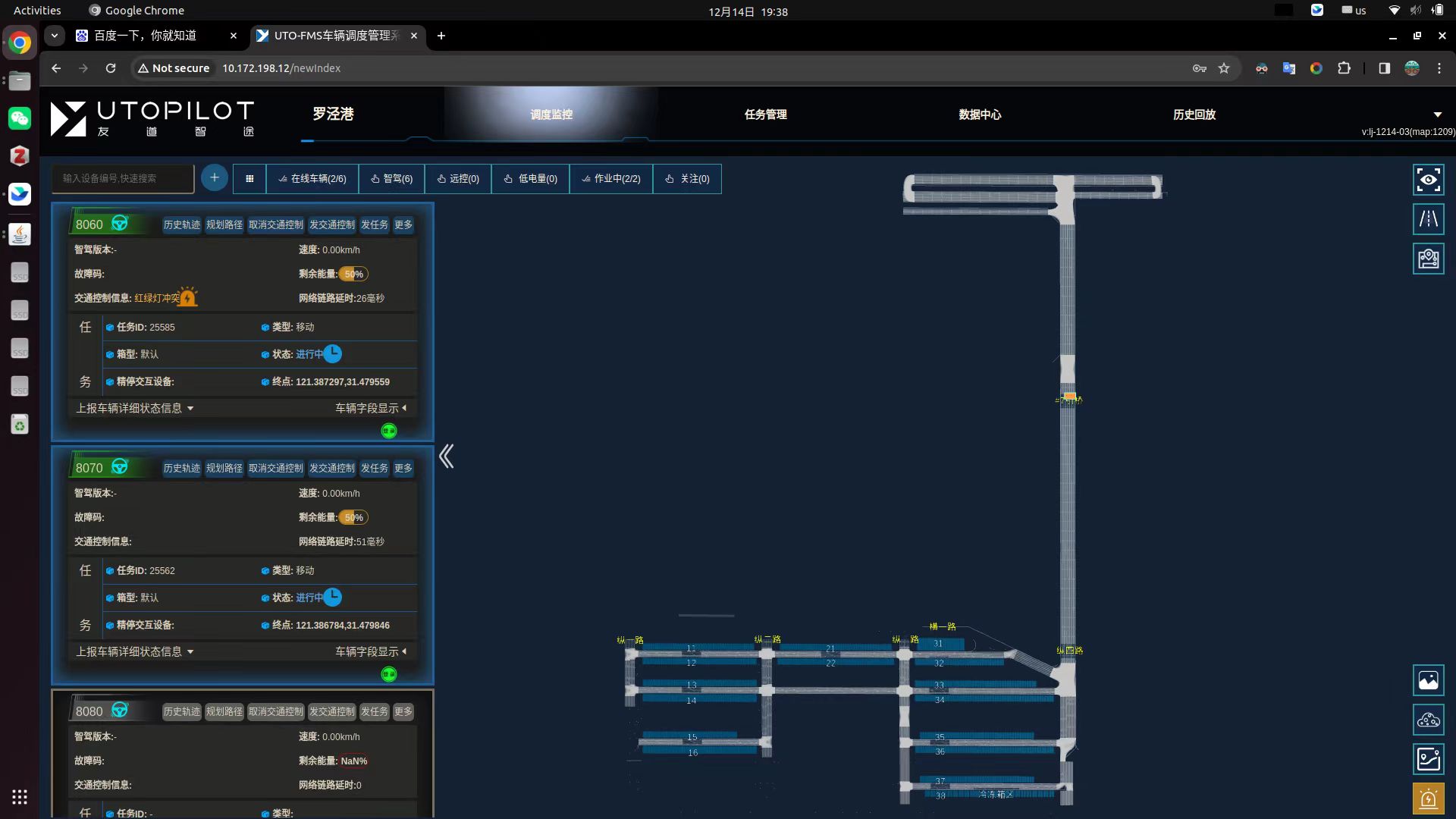
所提出的集群调度决策技术分别在上海外四码头、罗泾、福建泉州港口影子模式落地应用。调度模型通过调整车辆到达冲突区域的时间窗,化解90%车辆顶牛冲突,显著提高运营安全。
???
(a) 外四码头
 (b) 罗泾港
(b) 罗泾港

(c) 泉州港
图 3 项目落地港口的车队管理系统
- 构建基于预测控制的节能绿色驾驶控制技术,达到国际领先水平;
根据实车测试结果可知,在不同定速巡航下,面对拥堵交通路况,本项目开发的预测巡航控制(PCC)算法相比于友道智途(UTO)规控算法的节能率可达8.16%。
表1 各时间段测试节能效果
| 测试
时间 |
测试
功能 |
目标
车速[km/h] |
行驶
里程[km] |
平均
车速[km/h] |
气量消耗[kg] | 百公里气量消耗[kg/100km] | 节能率[%] |
| 12.27 | PCC | 51 | 11.05 | 41.99 | 5.24 | 47.42 | 9.41 |
| UTO | 50 | 11.24 | 42.70 | 5.88 | 52.34 | ||
| 12.27 | PCC | 46 | 7.37 | 39.97 | 2.76 | 37.40 | 7.27 |
| UTO | 45 | 8.23 | 40.18 | 3.32 | 40.33 |
表2 实车节能效果总结
| 测试
功能 |
总测试里程[km] | 总气耗
[kg] |
百公里气量消耗
[kg/100km] |
节能率
[%] |
| PCC | 18.43 | 8.00 | 43.41 | 8.16 |
| UTO | 19.47 | 9.20 | 47.26 |
针对实车测试过程中的典型工况进行本项目开发算法(PCC)节能效果分析如下:
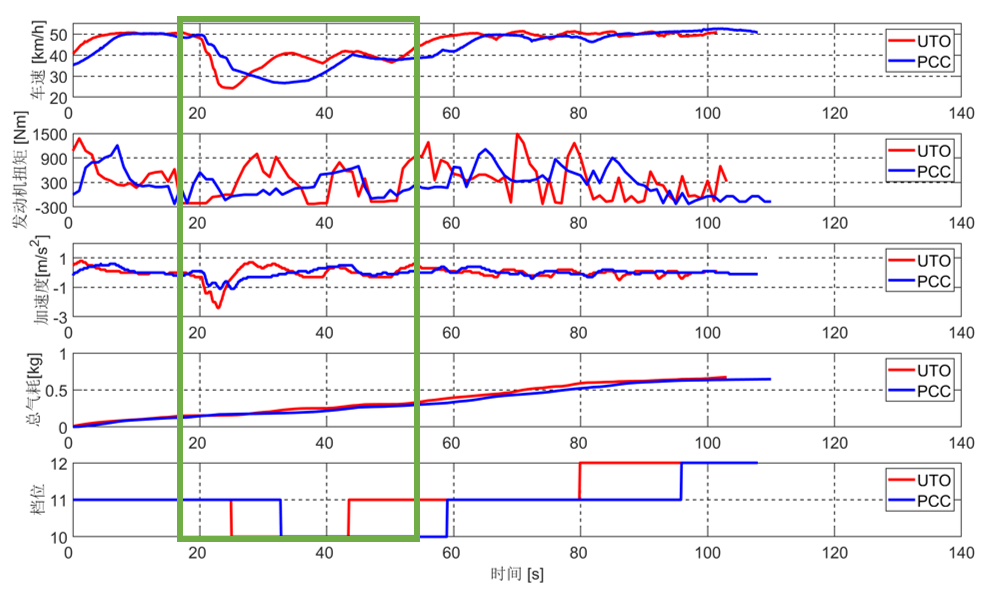 图 4 典型工况分析
图 4 典型工况分析
测试工况:本车巡航车速为50km/h,前车以30km/h切入本车道后,加速至40km/h后保持匀速行驶。
UTO模式下,本车驱/制动行为激烈,车速震荡较为激烈,导致发动机处于恶劣工作状态,燃油消耗较大。
PCC模式下,本车驱/制动行为平缓,车速变化平缓,发动机处于平稳工作状态,燃油消耗较小。
- 开发面向港区运输作业的仿真平台,达到国内领先水平
面向港区运输作业环境和功能,开发硬件在环仿真测试平台,通过开发港区作业功能模块和单车动力学仿真模块,仿真平台具备模拟复现港区实际作业流程、模拟不同车辆动力学性能的能力。
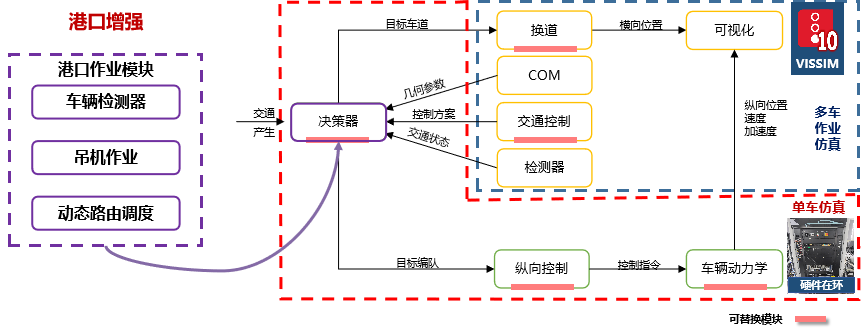 图 5 港区运营仿真平台架构
图 5 港区运营仿真平台架构
考虑不同车辆性能差异,仿真平台内嵌可配置参数的HiL硬件在环单车模拟仿真模块,提供高拟真实车动力学模拟功能。
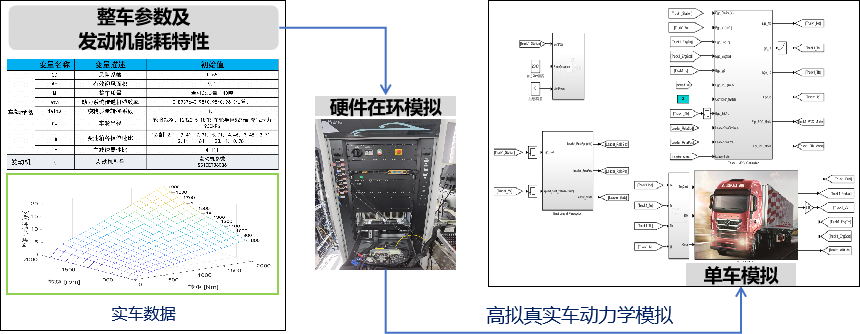 图 6 HiL在环仿真的车辆仿真模块
图 6 HiL在环仿真的车辆仿真模块
2、技术创新点
港区集卡集群调度技术先进性主要体现在:
- 解决车辆决策与车辆执行割裂问题,高效利用作业资源;
- 可应对港口作业状况动态变化状况,确保车辆任务执行率;
- 大幅提升调度问题求解效率,满足实时调度落地需求。
?????? 港区集卡绿色驾驶技术先进性体现在:
- 提出多时空尺度的预测能量优化方案,最大程度发挥节能效果、提升节能鲁棒性;
- 解决车载级控制器算力不足问题,提出控制模型高效求解算法,降低算法耗时,满足实时性要求。
港区运输作业的仿真平台先进性体现在:
- 支持真实模拟港区道路环境和作业流程;
- 支持真实模拟车辆运行仿真,具备硬件在环的车辆动力学模拟模块。
- 专利/论文/获奖情况
论文:
- A dispatching method for automated container terminals: What is next when precise execution is available?. IEEE International Intelligent Transportation Systems Conference2023,发表时间:2.13,EI收录(检索号:20241015673682)
- A Conflict-free dispatching method for AIVs in automated container terminals. China Automation congress 2023,发表时间:3.19,待EI收录
- Predictive Cruise Control Algorithm Design for Commercial Vehicle Energy Saving Based on Mixed Integer Programming. Conference on Vehicular Control and Intelligence 2023(CVCI),发表时间:1.25, EI收录(检索号:24508428)
- Eco-driving for Truck Platoon Velocity Planning Based on V2X Communication Considering Road Geometry. International Federation of Automatic Control 2023(IFAC), 发表时间:1.25, EI收录(检索号:20240515478687)
专利:
- 一种考虑作业优先级的港区智能集卡通行权分配方法、系统、设备及介质,申请号:9
- 一种基于多工况数据拟合商用车能耗及万有特性方法,申请号:2
获奖:
- IEEE Conference on Intelligent Transportation Systems (ITSC 2023) 最佳论文提名奖(10/1688),国际奖励
4、成果应用及经济效益(量化)
港区集卡调度技术建立了当前码头操作系统(TOS)和车队管理系统的联系,使得友道车队管理系统能够根据TOS系统发布的任务指令,进行车辆任务分配、路径和速度规划,从而减少车辆空载、空驶,减少作业冲突启停等。据统计,港区作业人工成本已达到港口物流整体成本70%,并且呈现出逐渐增加的趋势。本项目研发的港区内集卡调度技术充分挖掘自动化潜力,将创造巨大经济效益。对于车队运营方,可以减少能耗最高31%,按照每辆卡车节约成本40.5元/百公里,综合车队规模与运输距离,本技术具备节约能耗成本100万元/年的潜力。同样运输效率下,使用本技术后所需车辆数降低1/4,按照自动化集卡价格100万/辆, 百辆车的车队具备节约2500万/年的潜力。目前,本项目开发的港区内集卡调度技术已应用于上海外四码头、罗泾港口、福建泉州港,实现作业车辆冲突化解,其产生的经济效益将随时间积累,不断增加。
本项目研发的港区集卡绿色驾驶技术已通过实车验证,通过在上海港推广应用,可以助力友道大幅节约升本。据悉,2023年,洋山深水港集装箱吞吐量突破2500万标准箱,全年车流量突破1000万辆次,对于友道智途LNG半挂车来说,截至目前共有45辆,假设平均气耗为35kg/100km,天然气价格为6元/kg,洋山港干线物流线路长度约30km左右,若能实现5%以上的节能率,则每年至少可节省天然气16吨,共计10万元左右,同时每年可减少45吨CO2排放,因此本项目开发能够显著降低车辆能耗成本,创造可观的经济效益,同时显著提升能源利用率、降低碳排放,积极助力上海洋山港向“绿色化,低碳化”转型。
]]>
碳纤维汽车车身零部件低成本快速制造技术开发
Low-cost rapid manufacturing technology development of carbon fiber auto body parts
项目研制单位:东华大学? 上海赛科利汽车模具技术应用有限公司? 泛亚汽车技术中心有限公司
主要研制人员:余木火? 孙泽玉? 陶冬源? 张莉? 孔海娟? 张新异? 杜宇
陶雷? 闵伟? 戚亮亮? 张鹏飞
?
主题词:碳纤维复合材料? 车门内板? 防撞梁? 连接? 成型工艺
1、研究内容介绍
(1)目的意义:
结合公司长期在汽车车身覆盖件方面的制造经验及优势,充分利用复合材料一体化成型的优势以及金属材料易于维修保养的特点,开发一种碳纤维复合材料和金属材料相结合的新型混杂车门结构,解决碳纤维复合材料结构设计、制造、连接及模具开发等共性技术问题,使企业尽快掌握碳纤维复合材料零部件设计制造方法,成为国内少数几家能够自主进行碳纤维复合材料零件开发制造的汽车零部件企业,为上汽集团新材料汽车零部件的产业化开发及轻量化应用奠定技术基础。
(2)解决的关键技术:
1)复合材料车门内板一体化成型技术研究。
本项目基于低成本工艺HP-RTM,采用真空辅助树脂流动成型,开发了一种碳纤维复合材料车门结构。建立了液体成型车门内板工艺仿真分析方法、预成型体料片裁剪工艺预制方案,以及复杂结构液体成型工艺和注浇、出浇口设计,最终较原铝合金车门部件的总减重达到30%以上。
2)复合材料防撞梁成型关键技术研究。
本项目基于预浸料模压法这一低成本快速成型工艺,采用了预浸料热压罐成型工艺进行研究。并且基于相关工况,采用普通碳纤维编织布作为增强体复合材料,对前、后车门防撞梁进行复合材料铺层结构设计、制造、测试和评价,建立复合材料防撞梁材料-结构-工艺与性能一体化设计方法和开发关键技术。
3)复合材料的连接关键技术。
在复合材料的实际应用过程中,复合材料与复合材料、复合材料与金属材料之间的连接技术是一大难点。本项目结合车门的应用情况,对材料进行了单钉单剪测试和单钉双剪测试的连接性能评价方法,完成了CFRP-CFRP、CFRP-铝合金以及CFRP-普通钢的胶结和混杂连接等连接结构的系统研究,并且通过仿真分析进一步验证了实验的可靠性,建立了混杂复合材料车门系统连接关键技术研究方法和平台。
(3)技术路线和方法:
以汽车前、后车门为研究对象,开发一种碳纤维复合材料和金属材料相结合的新型混杂车门结构(见图1),车门内板及防撞梁使用复合材料进行设计制造,车门外板及窗框结构仍然使用金属材料。

图1 混杂车门结构示意图
(4)达到的效果和成果技术水平:
本项目以碳纤维复合材料为研究对象,对碳纤维复合材料单搭接连接结构、双搭接连接结构进行了试验研究,得出最佳连接区参数,为有限元模型的输入提供了详细参数。建立碳纤维复合材料连接结构的有限元模型,验证其模型的有效性。基于和连接结构相同的材料体系下制备碳纤维复合材料防撞梁并进行连接区设计,开展防撞梁三点弯曲试验、有限元分析,最终完成了包括车门外板、窗框、防撞梁、车门锁扣等一些附属配件的装配工作。
1)碳纤维复合材料单钉单剪连接结构中,建议选择8.1 mm孔径,如果需要在保证一定承载载荷的情况下,要求较高的挤压强度,建议选择6.1 mm孔径。增大厚度并不可以提高连接孔的挤压强度,而是在厚度和挤压强度之间去取一个较为平衡的值,即在满足挤压强度的条件下,适当的降低厚度,提高连接孔的连接效率。
2)在碳纤维复合材料单钉双剪连接结构中,一定程度的螺栓扭矩可以提高连接结构的挤压强度,最佳螺栓扭矩为9 N·m;端距比小于3的双剪连接是会产生挤压-剪切失效模式的。然而随着端距比大于3时,失效模式变为挤压失效,且端距比为3时,挤压强度最大;为了保证接头具有良好的承载能力,且发生较为安全的失效模式,建议边距比要达到6。
3)采用渐近损伤分析方法,运用Abaqus有限元分析软件,通过VUMAT子程序,定义改进的Hashin准则、整合了Tan、Tserpes材料刚度退化模型,仿真结果与试验结果进行对比,仿真具有较高的精度,模型可以很好地预测碳纤维复合材料单搭接螺栓连接的最终失效载荷,且双搭接模拟的失效载荷误差优于单搭接。
4)采用动态DSC和恒温DSC评价BAC 177和BAC 172两款树脂的固化放热特性并制定固化方案,BAC 177树脂固化方案为77℃/60min+103℃/30 min +146℃/30min,BAC 172树脂固化方案为82℃/30min+134℃/30min+159℃/30min。采用旋转流变仪分析BAC 177和BAC 172树脂的升温流变性能,BAC 172在常温下的可操作性要优于BAC 177。对BAC 177和BAC 172树脂的复合材料层合板力学性能进行对比,综合树脂流变性能,采用BAC 172树脂进行碳纤维复合材料车门内板产品开发。
5)采用DSC对单向预浸料的树脂体系固化放热特性进行表征,确定单向预浸料热压罐工艺的固化方案。预浸料需在125℃时升压至600 KPa并保压15 min,再升温至146℃保温30 min固化成型。对单向预浸料的力学性能进行表征,0°的拉伸强度为2748 MPa,拉伸模量为154 GPa、0°压缩强度为725 MPa,模量为115GPa、0°弯曲强度为1048 MPa,模量为106 GPa、90°拉伸强度为32 MPa,拉伸模量为8 GPa、90度的压缩强度169 MPa,模量为7 GPa、90°弯曲强度为74 MPa,模量为8 GPa、短梁剪切强度为100 MPa。
6)采用FiberSIM对防撞梁和车门内板铺层的铺敷性进行分析,通过FiberSIM的Darts优化铺层的铺敷效果,并导出CAD图纸指导预成型体裁剪。采用径向法测试T700NCF碳纤维布的渗透率及孔隙率,NCF碳纤维布在VARI工艺下的孔隙率为56%,纵向的渗透率为4.4*10-10 m2,横向的渗透率为2.2*10-10 m2。采用PAM-RTM对车门内板进行流道分析,采用两端线型灌注的方案,模拟灌注时间为37 min。
7)根据FiberSIM及PAM-RTM采用BAC 172树脂进行VARI工艺碳纤维复合材料车门内板制作,实际灌注时间为50 min。采用Abaqus进行防撞梁三点弯测试仿真分析,根据Abaqus和FiberSIM分析结果进行防撞梁样件制作。进行防撞梁三点弯测试,测试最大载荷为14.89 KN,最大位移为31.5 mm,满足性能要求。将碳纤维复合材料车门内板和防撞梁进行称重,并与原用的钢制样件进行对比。其中各部件实际减重效果不同,例如前后车门内板分别减重了26.7%、22.2%,前后防撞梁的减重在45%左右,车门各部件总减重也已达到了30%以上,
8)设计了包括车门外板、窗框、防撞梁、车门锁扣等一些附属配件的装配方案,并最终完成了整个车门装配工作。
2、技术创新点
(1)本项目开发一种碳纤维复合材料和金属材料相结合的新型混杂车门结构,复合材料车门内板采用一体化成型,较原铝合金车门部件的总减重达30%以上。
(2)复合材料与复合材料、复合材料与金属的连接技术是一大难点,本项目结合车门的应用情况,完成了CFRP-CFRP、CFRP-铝合金以及CFRP-普通钢的胶结和混杂连接等连接结构的系统研究,并且通过仿真分析进一步验证了实验的可靠性。
(3)本项目针对车门子系统进行了复合材料轻量化技术攻关,打通了材料评价、连接设计和实验、模具设计与开发、结构和铺层设计、仿真分析、成型工艺和性能检测等复合材料汽车零部件开发的关键环节,为复合材料零部件的量产可行性提供了技术支撑。
3、专利/论文/获奖情况
(1)专利
- 余木火, 孙泽玉, 卫原平, 孔海娟, 杨青, 刘涛然, 张新异, 杜宇, 陶雷, 戚亮亮, 闵伟, 毛毅玮, 欧汉文, 宋涛. 一种不同厚度纤维织物面内渗透率快速测试装置. CN111337402A, 2020-06-26.
- 余木火, 陶雷, 孙泽玉, 高洪平, 戚亮亮, 杜宇, 代兰奎, 张新异, 闵伟, 毛毅玮, 欧汉文, 宋涛. 袋压缩树脂传递模塑成型模具、成型装置及成型方法. CN111674059A, 2020-09-18.
(2)发表论文
- Zeyu Sun, Jie Xiao, Lei Tao, Yuanping Wei, Shijie Wang, Hui Zhang, Shu Zhu and Muhuo Yu. Preparation of High-Performance Carbon Fiber-Reinforced Epoxy Composites by Compression Resin Transfer Molding. Materials, 2018, 12(1) : 13. (三区)
- 孙泽玉, 余许多, 陶 雷, 高洪平, 肖 杰, 余木火*. 不同内径碳纤维复合材料轴管的振动性能研究. 复合材料科学与工程. 2020(05):63-68.
- 张新异, 孔海娟*, 胡之峰, 孙泽玉, 余木火, 孙昊. 垫片尺寸对碳纤维复合材料螺栓连接单搭接挤压强度影响研究. 复合材料科学与工程, 2020(05): 53-62.
- 王士杰, 孙泽玉*, 陶雷, 杨青, 杜宇, 代兰奎, 熊风, 朱姝, 张辉, 余木火*. PMI泡沫对碳纤维复合材料抗低速冲击性能的影响. 玻璃钢/复合材料, 2019(08):53-58.
4、成果应用及经济效益预测
本项目所采用低压RTM工艺,可较高压RTM工艺降低80%的成本。本项目前车门板、后车门板、前防撞梁、后防撞梁四个部件,分别达到了26.7%、22.2%、45%、45%的减重效果,车门部件总减重达30%以上。将四个部件作为一套部件计算成本得到:当生产处于打样阶段时,即公司年产量在500件以内时,可以控制成本单价在4386元左右:当处于年产量维持在500-5000件的小批量阶段时,可控制成本单价在2632元左右;当处于年产量在5000件以上的批量阶段时,成本单价可控制在867-1315元左右。而材料和工艺成本有着同样的成本变化:碳纤维复合材料打样阶段500元/公斤,碳纤维复合材料小批量阶段成本300元/公斤,碳纤维复合材料批量阶段成本100-150元/公斤。因此本项目未来将具有巨大经济效益与社会效益。
]]>基于MS计算的高电导复合电解质开发
Development of composite electrolytes with high conductivity based on MS calculations
项目研制单位:中国科学院上海硅酸盐研究所 ?上海捷氢科技股份有限公司
主要研制人员:刘建军 ?王有伟 ?邱吴劼 ?王田田 ?李强 ?赵晓琳
吴晓燕 ?陈光颖 ?任欢
主题词:高电导 ?电化学窗口 ?固体电解质 ?高通量计算平台
1、研究内容介绍
- 本研究的目的意义:
传统锂离子电池采用的有机液态电解质的电化学窗口较窄,导致有机电解液/锂盐的氧化还原分解。更加重要是金属锂负极面临的自发化学副反应、锂枝晶生长、不稳定的界面膜、体积变化较大等问题,依然难以解决。最后,有机电解液易挥发、易燃易爆的特性给电池体系带来了严重的安全隐患。因此发展全固态电池技术,突破有机电解液存在的种种限制势在必行。
目前开发固体电解质主要包含三类,一类是包括氧化物、硫化物、卤素、磷酸盐类等无机固体电解质,归结为钙钛矿,NASICON,石榴石,硫化物的结构特征。它们具有高锂离子电导率优势,但是其力学性能与化学稳定性较差。在组装电池应用中,存在正极反复体积膨胀收缩后,与固体电解质相的接触会逐渐变差,离子电导率逐渐下降的问题。第二类是有机聚合物电解质,是唯一可以实现商业化的固体电解质,具有较好的力学性能,然而在低电导率与锂枝晶方面存很大问题,致使很多大规模应用需要在高温条件下操作。第三类无机-聚合物复合固态电解质则可以达到取长补短的效果。
因此,本项目围绕第一类和第三类固体电解质材料,重点研究电化学窗口的稳定性以及电导率的优化等与实际应用切实相关的问题。
- 要解决的关键技术
(1)发展计算电化学模型与方法
(a)建立复合电解质化学及电化学稳定性模型。利用MS、VASP等程序包中的密度泛函理论方法研究无机电解质,研究有机聚合电解质及复合电解质在外加电势及温度下的分解产物,建立其化学及电化学稳定性模型。
(b)建立电化学窗口热力学与动力学计算模型。利用MS、VASP等程序包中的密度泛函理论方法研究无机相、有机聚合物相在电化学环境下的热力学稳定窗口,利用NEB方法研究无机、有机聚合物相动力学分解路径与势垒,建立无机相与有机聚合物相的电化学稳定窗口的计算模型。
(c)建立离子电导率的动力学计算模型。利用第一性原理计算与分子动力学模拟、NEB计算方法研究无机、有机聚合物相中Li+迁移路径、速率及迁移势垒,建立离子电导率的动力学计算模型。
(d)建立界面结构计算预测模型。基于grand thermodynamic potential,利用metadynamics计算研究在参与化学及电化学反应时界面相结构的演变,建立预测界面结构、热力学稳定性的计算模型。
(e)建立分散液的计算预测模型。首次提出树脂在溶剂中的卷曲度计算模型,实现平台落地应用,指导全氟磺酸树脂分散液配方的高效设计。
(f)搭建有机无机固体电解质数据库。基于第一性原理对无机有机电解质的物理化学性能及电化学性能(电化学窗口、密度、禁带宽度、PDOS)进行系统计算,搭建出一个固体电解质物理化学性能及电化学性能的数据库平台。
(2)电化学稳定窗口、热力学稳定性与离子迁移率计算
(a)利用化学及电化学稳定性模型计算无机、有机相的分解产物:研究无机氧化物电解质及有机聚合物电解质在温度及附加电压的作用下,无机氧化物、有机聚合物及Li盐的分解产物,基于分子动力学研究有机、无机及复合电解质的分解温度,寻找其相变的临界温度及电压;
(b)利用热力学与动力学模型计算无机氧化物、聚合物有机相电化学窗口。对无机氧化物电解质 (Garnet, NASICON)、有机聚合物电解质(PEO,PAN,PVDF)电化学、热力学稳定性进行计算,基于第一性原理热力学模型计算电化学窗口,并基于NEB对不同相转变能垒进行分析;
(c)利用分子动力学与NEB方法计算无机氧化物、聚合物有机相离子电导率及迁移能垒。利用无机氧化物电解质锂离子输运模型,基于分子动力学模拟、NEB方法,计算锂离子的迁移路径、迁移能垒、及速率常数,建立微观结构特征对锂离子迁移的影响机制。
(d)开展无机氧化物、聚合物有机相电子结构分析。利用投影态密度、Bader电荷分布、差分电荷、能带结构等定性分析其对电化学窗口与离子迁移率的影响规律。
(3)界面相结构预测与电化学性质计算
(a)准动力学计算界面结构。通过化学、电化学稳定性热力学模型,建立convex energy hull的相图,确定界面相的化学稳定性,基于grand thermodynamic potential研究界面相结构的电化学稳定性,利用metadynamics研究界面结构演变机制;
(b)热力学与动力学模型计算界面相电化学窗口、热力学稳定性。对无机氧化物、有机聚合物电解质电化学、热力学稳定性进行计算,基于第一性原理热力学模型计算界面相电化学窗口,并基于NEB对不同相转变能垒进行分析;
(c)分子动力学与NEB计算界面相离子电导率。利用有机聚合物电解质锂离子输运模型,基于分子动力学模拟、NEB方法,计算研究锂离子的迁移机制、迁移能垒、速率常数及微观结构特征对锂离子迁移的影响。
- 采用的技术路线和方法
(1)电化学窗口计算模拟:电化学窗口的形成机制主要有热力学和动力学两部分的贡献。热力学的贡献通过能斯特方程来确定,而动力学部分则通过动力学反应能垒决定。本项目在传统热力学方法上,额外引入了动力学影响,准确计算了LLZO、LLTO等固体电解质的电化学窗口。
(2)微观锂离子输运和宏观离子电导率的计算:(1)本项目采用离子轨迹模型来分析离子在输运过程中的轨道情况,并且采取结构调控,传输离子浓度调控等方法来增加离子的传输路径的多维性,目的是使电解质中的传输离子的活度达到最大化,从而提高电解质的离子电导率。(2)离子在电解质输运过程中,能垒的表征和分析对离子输运的流畅性和离子迁移速率的大小起着十分关键的作用。该项目关于离子电导率的另一个分析模型为离子跃迁能垒,所采用的计算方法主要有额伦尼乌斯方程和NEB过渡态方法。
(3)界面相的结构演变、热力学、电化学反应的计算:搭建复合电解质界面模型,使用化学反应过程中各物质的吉布斯自由能对其化学反应、电化学分解相、电化学反应进行计算。采用准动力学模拟,预测界面结构的重构和演变。
(4)电极材料制备,微观结构与电化学性能表征:通过传统制备方法制备计算筛选出的高性能电极材料。利用先进的物相表征方法和电化学测试仪器,表征产物的物相成分、微观结构、表面结构、元素价态和循环过程中的电化学性能。
- 达到的效果和成果技术水平
(1)首次提出元素掺杂LLZO提高电化学稳定性筛选规则(V=6.71-0.27q/r3),基于元素半径与电荷关系筛选掺杂元素,从而提高电化学窗口;

(2)计算预测6%Ta掺杂LLZO可以实现最高锂离子电导率,产线以Ta掺杂的LLZTO粉体作为正极涂胶的主要原料,LLZTO室温离子电导率高,可达10-3 S/cm;

(3)提出无机/有机复合界面结构中组成与离子电导率计算模型,首次实现有机与无机混合比率对离子电导率的定量计算;
(4)针对Li金属与固体电解质界面副产物消除问题,提出少量钠取代与Li3P消除副产物的技术路线,实验测定钠取代界面电阻显著降低(340 Ω/cm2 → 0.66 Ω/cm2 ),循环性能提升。
(5)计算设计三种新型固体电解质,Al-doped LTPO(10-3 S/cm)、LSiPS(10-3 S/cm)、NASICON-Li3Zr2Si2PO12(10-3 S/cm),期望推进产业化。

(6)建立界面结构中电化学性质计算模拟的标准化方法,完成“数据驱动材料研发平台”(DDMP)的高通量计算-机器学习-材料数据库一体化平台,并投入实际使用,为电池材料的高通量设计提供技术基础。

(7)在“数据驱动材料研发平台”(DDMP)的高通量计算-机器学习-材料数据库一体化平台的基础上,开发了全氟磺酸树脂形态分布的高通量计算方法,并首次提出了卷曲度的计算表达式,从而定量描述树脂的形态分布。通过计算模拟研究溶剂类型和浓度对不同基醚单体的全氟磺酸树脂形态分散性的影响,不仅可以快速确定溶剂类型和最佳混合浓度,也可以极大缩小实验研究范围,提升全氟磺酸树脂制备效率。
2、技术创新点
(1)利用热力学与动力学的计算方法结合研究复合电解质界面结构、电化学窗口、以及电导率,从而实现计算与实验结合是本项目的第一个创新点,传统计算研究主要是利用热力学方法(分解反应自由能与grand potential phase diagram)来确定电化学窗口与界面结构,文献报道与实验结果有很大偏差,主要归结于动力学反应势垒抑制或者延缓分解速度,因此本项目提出第一性热力学与动力学计算结合,建立电化学性能预测方法,是在研究方法上创新。
(2)通过计算与实验结合研究建立组成–结构–电化学窗口与离子电导率关系,揭示电化学性能影响机制,进一步通过组成结构调整改性,提高电化学窗口与离子电导率性能。对于复合材料而言,界面结构对材料结构与性能影响至关重要,然而传统实验研究对界面结构形成于变化表征非常有限,组成结构的改性依赖于大量实验积累研究经验与猜测,本项目从微观结构计算与实验表征结合探索复合电解质的性能优化,是材料基因工程技术典型应用,因此在研究策略上创新。
3、专利/论文/获奖情况
- 论文:围绕固体电解质材料的电化学窗口、离子电导率、以及界面结构性能优化等发表了3篇高质量学术论文,为设计固体电解质材料提供新思路。
- The critical role of oxygen-evolution kinetics in the electrochemical stability of oxide superionic conductors. Journal of Materials Chemistry A, 7 (2019), 17008-17013.
- Maximizing ionic transport of Li1+xAlxTi2-xP3O12 electrolytes for all-solid-state lithium-ion storage: A theoretical study. Journal of Materials Science & Technology, 73 (2021), 45-51.
- A High‐Performance Carbonate‐Free Lithium|Garnet Interface Enabled by a Trace Amount of Sodium. Advanced Materials, 32 (2020), 2000575.
- 专利:基于“数据驱动材料研发平台”(DDMP)的高通量计算-机器学习-材料数据库一体化平台,提交并申请软件著作权1项。
4、成果应用及经济效益预测
(1)提出的元素掺杂LLZO提高电化学稳定性筛选规则(V=6.71-0.27q/r3),从理论层面直接指出通过哪些元素掺杂可以提高电化学窗口,并直接指导实验合成;通过与企业相关实验人员合作,制备出了具有比LLZO更高的电化学窗口的固体电解质材料,大幅降低了研发成本,极大缩短了研发周期。
(2)计算预测6%Ta掺杂LLZO可以实现最高锂离子电导率,产线以Ta掺杂的LLZTO粉体作为正极涂胶的主要原料,LLZTO室温离子电导率高,可达10-3 S/cm;LLZTO与聚合物、锂盐混合制备高陶瓷浆料,均匀涂覆在正极表面;涂胶正极组装电芯投入使用,可以在能量密度有较小损失(仍然达标)的情况下解决液态电芯固有的安全问题。
(3)通过建立高通量计算-机器学习-材料数据库一体化平台,极大缩短了固体电解质材料电化学性能计算模拟的周期。通过逐一提交、分析的传统计算模拟方式,研究单一固体电解质的电化学性能需要耗费2-3周;而通过高通量计算平台,1周内可完成至少10种固体电解质电化学性能的计算模拟。
(4)基于“数据驱动材料研发平台”(DDMP)的高通量计算-机器学习-材料数据库一体化平台,首次提出树脂在溶剂中的卷曲度计算模型,实现平台落地应用,指导全氟磺酸树脂分散液配方的高效设计。
]]>基于因果推理的无人驾驶冗余决策模型研究
Research on Redundant Decision Model of Automotive Driving based on Causal Reasoning
项目研制单位:同济大学? 上海友道智途科技有限公司
主要研制人员:吴光强? 张显宏? 毛礼波? 李晓芸? 曾奇? 陈秋石? 张栋? 王浩
宗健壮? 毛瑞驰? 温高博? 厉逸航? 刘序阳? 胡汇泽? 陈浔杰??任猛
主题词:无人驾驶决策模型、冗余决策框架、强化学习、贝叶斯网络
1、研究内容介绍
- 本研究的目的意义
无人驾驶车辆行驶过程中面临着复杂不可控的交通环境(包括动态行人车辆、道路标志不清晰、红绿灯故障、城市改造建设等)、多变的气候条件(包括暴雨大雪、突现的强光等)、感知数据精度降低和部分模块失效等问题,极大地限制和影响无人驾驶车辆应用和运营。
目前的决策系统是以基于规则设计的有限状态机算法为主,基于规则的决策技术虽然能够在部分场景下较好完成汽车的无人驾驶任务,但当无人驾驶汽车实际面临复杂陌生的交通环境时,基于规则的决策技术由于规则复杂度等因素就显得捉襟见肘,极大地限制无人驾驶汽车的应用和运营。另一方面例如监督学习等基于神经网络的决策算法需要输入带有标签的数据,对数据进行标记涉及的工作量巨大,且算法过程缺乏可解释性。另外目前的决策系统主要以单一决策方法为主,较少进行学习算法与规则算法相结合的决策研究,决策一旦出现错误或者出现故障,将导致灾难性的后果或者导致整个系统停止运行。另外仅基于规则的决策难以完全覆盖所有场景,仅基于深度学习的决策存在“黑箱”难题,故而学习型算法与规则型算法结合的决策系统的开发是解决该问题的有效途径。
因此,为简化各种场景下规则的人工建立和数据标记的工作,提高复杂场景下无人驾驶汽车的适应性、提升泛化能力,使得无人驾驶汽车能够表现出更高的智能水平,处理陌生交通环境下的某些特殊情况,提高无人驾驶汽车决策的可靠性,结合深度学习的强化学习、贝叶斯网络的因果推理决策方法受到越来越多的关注。
上海友道智途科技有限公司依托洋山港“5G+L4”智能重卡项目的技术积累和成功经验,聚焦港口、厂区等特定场景与干线物流场景的L4级和L3级自动驾驶产品,具有丰富的商用车无人驾驶技术落地应用运营的经验与基础。通过产学研合作,开展基于因果推理的无人驾驶冗余决策模型的技术研究与开发工作,掌握国际领先的无人驾驶决策核心技术,开发具有自主知识产权的无人驾驶决策技术,实现冗余决策系统与整车无人驾驶系统的匹配和集成,为洋山港5G智能重卡的推广应用提供技术支持。
- 要解决的关键技术
(1)基于数据驱动的决策算法应用技术;
(2)结合静态与动态冗余的多种决策算法冗余架构设计技术;
(3)前车切入切出场景下速度规划技术;
(4)考虑安全性与高效性的路口决策技术;
(5)无人驾驶决策算法仿真、台架、实车验证与评价技术。
- 采用的技术路线和方法
根据研究内容,项目技术方案分为七个阶段:
(1)现状调研
国内外无人驾驶决策技术开发和应用现状研究,总结与无人驾驶决策技术相关的强化学习、贝叶斯网络、有限状态机等多方面的最新技术与应用现状,探索无人驾驶决策技术开发的技术难点和前沿理论。
(2)理论研究
分析典型的工况场景,分别设计基于强化学习、贝叶斯网络与规则的无人驾驶汽车决策模型,研究无人驾驶汽车自适应巡航速度规划算法,进行原理的验证,保证各个模块的有效性。
(3)算法集成
基于各模块核心算法研究,分析不同算法的性能效果与适用场景,设计具有静态冗余与动态冗余的决策系统软件架构,研究不同算法的判别机理,集成基于因果推理的无人驾驶冗余决策系统。
(4)驾驶模拟器(Driving Simulator,DS)仿真
根据典型工况场景,设计、搭建基于DS的仿真模型,并建立有效的评价指标,进行300km的DS仿真测试。
(5)台架试验
根据典型工况场景,设计虚拟环境下的试验工况条件,使用集成好的基于因果推理的无人驾驶冗余决策系统,在友道智途HILs台架进行测试试验,验证算法在理想条件下的效果。
(6)数据回放试验
根据典型工况场景,录制log进行数据回放并进行基于因果推理的无人驾驶冗余决策,建立评价函数,通过主客观对比分析对其优越性进行评估。
(7)实车试验
将本项目设计的基于因果推理的无人驾驶冗余决策系统代码嵌入友道智途无人驾驶系统,在目标车的配合下进行实车试验,分别通过主观与客观的评价方法对决策性能进行评估。
- 达到的效果和成果技术水平
(1)开发了基于因果推理的冗余决策模型;
(2)实现了高速公路下的换道决策与速度规划;
(3)实现了十字路口场景下的决策与规划;
(4)基于上述决策模型、技术框架的车辆行为决策规划系统,实现典型场景下的决策正确率不低于95%(当前有限测试场景下达到100%),决策时间不多于60ms的技术指标;
(5)搭建了决策算法DS仿真测试平台;
(6)提供多层级的冗余决策系统代码与说明;
(7)与原车目标版本算法在友道智途HILs台架与实车上进行了测试与比较,并进行日志回放测试;
(8)进行了基于DS的大规模测试验证;
(9)培养了掌握无人驾驶冗余决策核心技术的高层次专业技术人才,同时也补充并增强了智能重卡智驾平台的技术水平,为实现国际领先的基于数据驱动的无人驾驶决策方法落地提供技术支持。
- 附典型图表、数据、产品图说明
图1 HILs台架测试现场
表1 换道决策台架测试结果统计
| ?????????? 算法
统计指标 |
冗余决策算法 | 基于规则的算法 |
| 自车平均速度 | 18.20m/s | 17.00m/s |
| 换道决策时本车道前车平均相对距离 | 98.31m | 65.42m |
| 换道决策时本车道前车平均相对速度 | -16.90km/h | -10.8km/h |
| 评价指标得分 | 16.11 | 14.82 |
在HILs台架测试下基于因果推理的冗余高速公路换道行为决策算法具有良好的决策性能。使用了冗余决策的车辆更早地换到空旷车道上提高了车速,提升了整体的通行效率。
表2 自适应巡航台架测试结果统计
| 评价指标
场景 |
同济 | 友道智途 | ||||
| (s) | (m/s2) | (m/s3) | (s) | (m/s2) | (m/s3) | |
| 1 | 6.01-6.17 | 0.1402 | 0.1536 | 3.71-4.12 | 0.4051 | 0.2031 |
| 2 | 0.2028 | 0.1629 | / | / | ||
| 3 | 0.3139 | 0.2286 | 0.3516 | 0.2168 | ||
| 4 | 0.1817 | 0.1749 | 0.3540 | 0.1747 | ||
在台架上测试的本项目设计的自适应巡航算法相比于原车速度规划算法的安全跟车距离更长,在行驶过程中更加安全且舒适性更高。
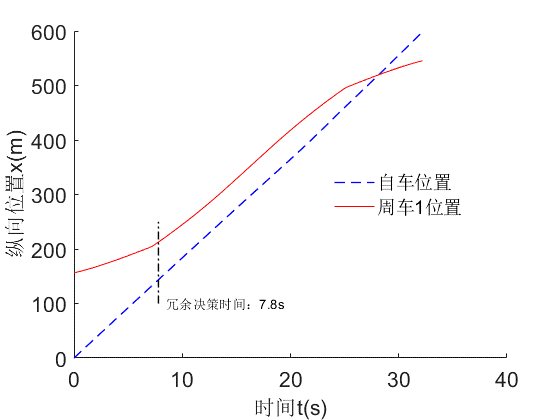
(a)自车与周车纵向绝对位置
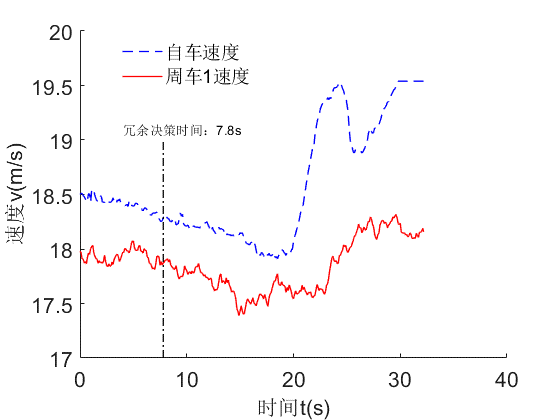
(b)自车与周车行驶速度
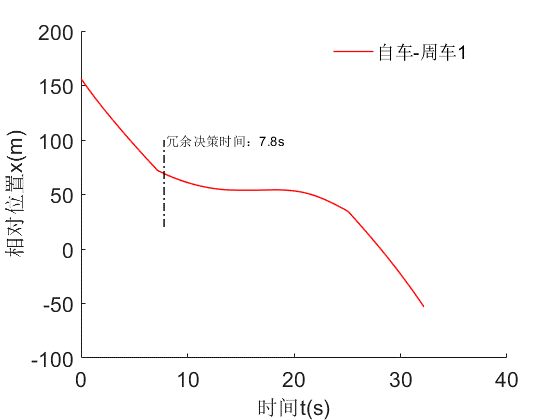
(c)周车相对自车纵向距离
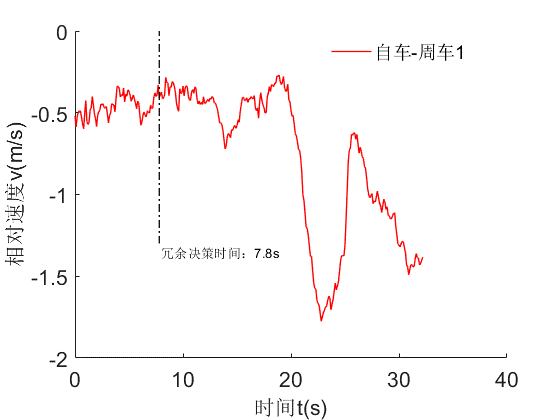
(d) 周车相对自车行驶速度
图2 东海大桥实车测试自车与周车运动响应
表3 东海大桥实车测试结果
| 算法
统计指标 |
冗余决策算法 |
| 自车平均车速 | 17.99m/s |
| 换道决策时本车道前车平均相对距离 | 68m |
| 换道决策时本车道前车平均相对速度 | -1.62km/h |
东海大桥是一个典型的高速公路驾驶场景,项目组将上述算法在该场景下基于友道的智能重卡进行了大规模应用与验证,验证冗余决策换道算法和自适应巡航控制算法的有效与先进性。
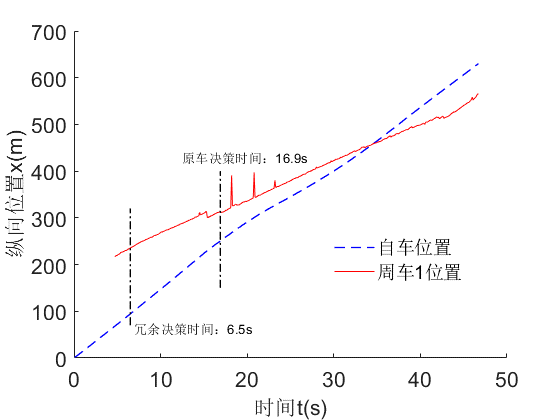
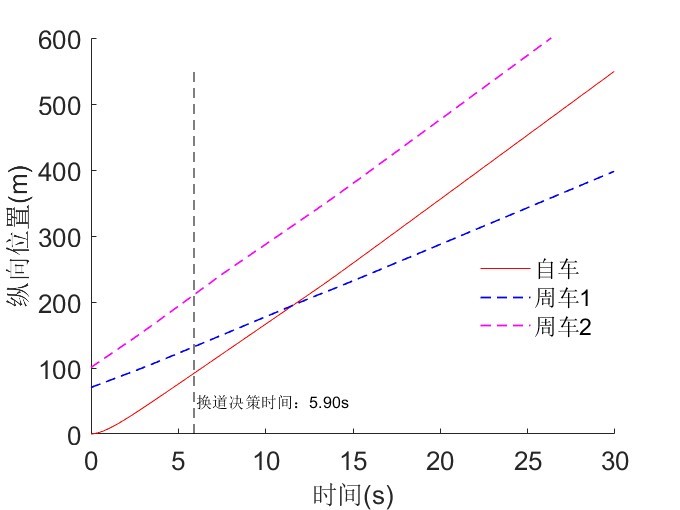
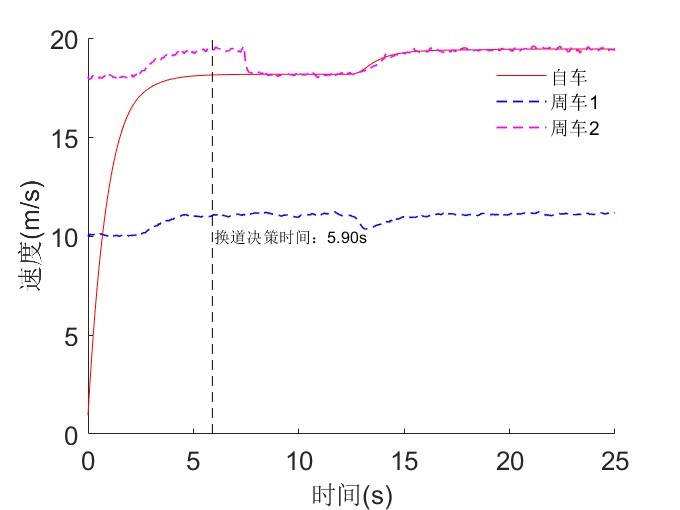
(a)自车与周车纵向绝对位置

(b)自车与周车行驶速度
图3 换道决策实车试验比较图
表4 换道决策实车测试结果
| 统计指标 | 冗余决策系统 | 原车决策系统 |
| 换道决策时前车平均相对距离 | 114.75m | 93.22m |
| 换道决策时前车平均相对速度 | -4.13m/s | -3.94m/s |
| 自车平均车速 | 14.66m/s | 13.51m/s |
| 存在碰撞风险的时间 | 0s | 3.1s |
| 评价指标得分 | 14.66 | 12.89 |
在实车上基于因果推理的冗余换道行为决策算法表现出了良好的决策效果与稳定性,做出的决策可以提高智能重卡的行驶效率与安全性能。
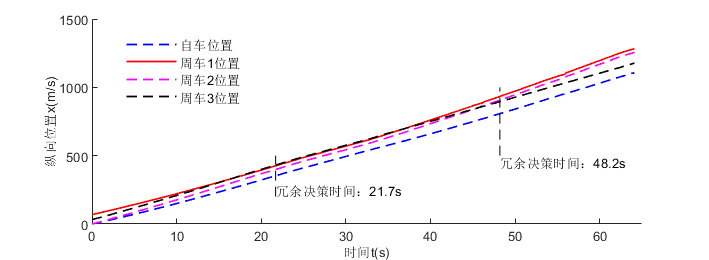
(a)自车与周车纵向绝对位置
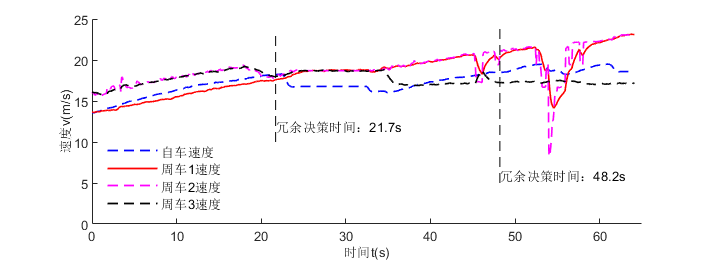
(b)自车与周车行驶速度
图4 冗余换道决策大规模实车应用测试自车与周车运动响应
测试中出现了一次连续两次换道的情形,自车在等待目标车道后方四辆快车超越自车后采取了换道行为,并在换道后又遇到前方慢车,继而又进行了第二次换道,结果如图4和表5所示。
表5 复杂工况决策算法实车测试结果统计
| 算法
统计指标 |
冗余决策算法 |
| 第一次换道自车平均车速 | 18.20m/s |
| 第一次换道决策时本车道前车平均相对距离 | 72.20m |
| 第一次换道决策时本车道前车平均相对速度 | -2.31km/h |
| 第二次换道自车平均车速 | 18.51m/s |
| 第二次换道决策时本车道前车平均相对距离 | 88.10m |
| 第二次换道决策时本车道前车平均相对速度 | -4.48km/h |
经过实车测试与验证,本项目设计的基于因果推理的冗余换道行为决策算法目前在测试试验中没有被安全员进行接管,且在复杂多变的场景下做出的决策可以提高智能重卡的行驶效率与安全性能。

?? (a) 同济算法下自车加速度
(b) 原车功能算法下自车加速度
图5 自适应巡航实车试验比较图
表6 自适应巡航实车测试结果统计
| 评价指标
场景 |
(s) | (m/s2) | (m/s3) |
| 定速巡航 | 3.9-4.6 | 0.1181 | 0.1304 |
| 跟车场景 | 0.3021 | 0.1365 | |
| 较远处cut in场景 | 0.2918 | 0.2437 | |
| 较近处cut in场景 | 0.2867 | 0.2021 | |
| 连续cut in场景 | 0.3141 | 0.2292 |
经过实车测试,本项目设计的自适应巡航控制算法在东海大桥复杂多变的场景中具有较好的安全性和乘坐舒适性。

图6 复杂与极端工况DS仿真
(a) 自车与周车纵向绝对位置
(b)自车与周车行驶速度
图7 ?DS仿真结果图
表7 冗余决策算法DS仿真测试结果
| 算法
统计指标 |
冗余决策算法 |
| 自车平均速度 | 70km/h |
| 换道决策时本车道前车平均相对距离 | 40.58m |
| 换道决策时本车道前车平均相对速度 | -25.58km/h |
| 换道决策时目标车道前车平均相对距离 | 118.90m |
| 换道决策时目标车前平均相对速度 | 4.62km/h |
| 评价指标 | 16.58 |
在基于DS的仿真测试中,冗余换道行为决策算法表现出了良好的决策效果与稳定性。从仿真层面验证了冗余换道行为决策算法的可靠性。
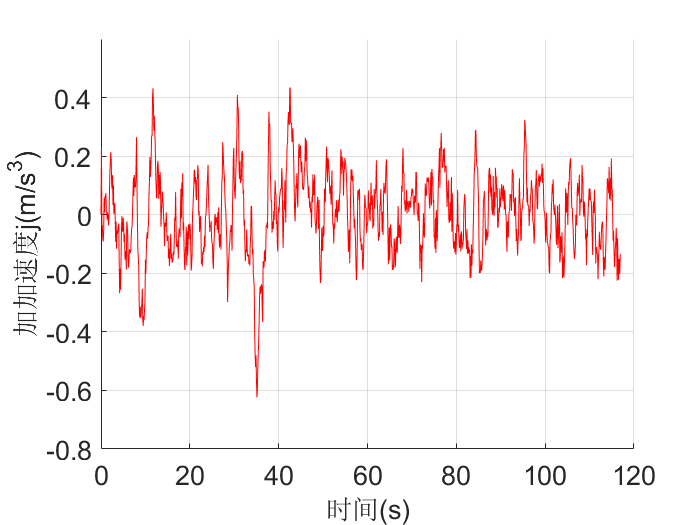
表8 路口规划实车同济测试结果
| ?????? 评价指标
场景 |
加速度均方根 | 加加速度均方根 |
| 1 | 0.7678 | 0.8622 |
| 2 | 0.6650 | 0.7742 |
表9 路口规划实车原车测试结果
| 评价指标
场景 |
加速度均方根 | 加加速度均方根 |
| 1 | 0.6248 | 0.6260 |
| 2 | 1.0477 | 0.9314 |
综上所述,本项目设计的冗余决策规划算法在DS、台架与实车的测试试验中都表现出了良好的性能,对于智能重卡的安全性与通行效率有一定的提升。在客观数据的分析上,部分场景工况下的部分指标上要优于原车目标版本的功能,在测试工程师和安全员的主观评价上目前达到的效果不亚于原车目标版本功能表现。
2、技术创新点
(1)提出一种基于自然驾驶数据的换道样本制作方法;
(2)采用基于粗糙集理论的属性约简方法,使得用于贝叶斯推理的条件属性集最优;
(3)采用基于卡方值校验的方法对属性值进行离散,减小数据之间的相关性,使得决策策略更优;
(4)通过使用深度强化学习的方法可以处理复杂工况下多维度的信息;
(5)基于DQN的算法设计决策模型提高了训练效果与收敛速度;
(6)提出一种权衡跟车距离与车速的自适应巡航上层控制算法;
(7)采用基于S-t图和A*的速度搜索与分段加加速度的速度优化方法,使得算法能够灵活应对动态障碍物,并保证速度优化具有曲率级别连续性。
3、专利/论文/获奖情况
申请国家发明专利:
[1]一种车辆换道开始时刻的确定方法和装置。(受理号:202210712930.4,实质审查中)
[2]基于贝叶斯网络的高速公路换道决策方法。(受理号:202210085007.2,实质审查中)
已获国家计算机软件著作权:
[1]智能驾驶换道决策特征提取与样本制作软件。(登记号:2022SR0218202)
发表论文:
[1] Xianhong Zhang, Xuyang Liu, Xiaoyun Li, Guangqiang Wu. Lane Change Decision Algorithm Based on Deep-Q-Network for Autonomous Vehicles[C]. SAE WCX 2022. 2022-01-0084. (EI,Accession number:20221611970939)
[2] Qi Zeng, Guangqiang Wu, Libo Mao. A Support Vector Machine-Based ?Truck Discretionary Lane Changing Decision Model[C]. Slovenia. 2021 20th International Conference on Advanced Robotics (ICAR), 2021, 435-440. (EI,Accession number:20220811680351)
4、成果应用及经济效益预测
本项目结合强化学习与贝叶斯网络算法,搭建动静态冗余决策框架,开发出具有自主知识产权的无人驾驶决策系统,并配套提供高速道路物流场景下自适应巡航与社会道路十字路口场景速度规划算法,能够广泛适用于商用车在结构化道路行驶的场景,有效弥补我国在面向复杂工况的无人驾驶决策领域存在的规则有限的现状,能够加速无人驾驶决策系统研发与生产,协助友道智途实现商用车无人驾驶落地,具有优良的应用前景。
项目将在东海大桥开展35台以上车辆的无人化物流作业示范运行,每辆智能重卡年工作时间约2900小时左右,约运输5万标箱。通过部署本无人驾驶决策系统,可以减少20%的人工成本,生产效率提升约30%,且维护成本可以降低10%。本项目将产生巨大的经济和社会效益。
]]>论文:Prediction and Optimization of Full-Vehicle Road noise based on random response analysis
]]>面向中国用户典型路面的整车声学虚拟开发和主动控制技术
Vehicle acoustic virtual development and active control technology for typical roads of Chinese users
项目研制单位:同济大学? 上汽大众汽车有限公司
主要研制人员:张立军 ?曹诚 ?张帅 ?皮雄飞 ?冯鹏醒 ?张超 ?高赟海 ?束元
赵野 ?张孟浩
主题词:道路噪声主动控制 ?虚拟样机开发 ?声固耦合模型 ?参考信号选取
一、研究内容介绍
研究目的与意义:
本项目将主动噪声控制技术引入道路噪声控制领域,充分发挥了主动噪声控制低频降噪效果好,成本低的特点,是未来汽车NVH控制的发展趋势,具有很强的前沿性,使得企业在相关技术领域走在行业前列。同时,本项目为企业实现了面向中国用户典型路面整车声学虚拟开发能力的建设,积累了相关开发经验,可以帮助企业缩短产品开发周期、节省设计成本。
关键技术:
实现路面-底盘-车身-车舱声学环境多个部件的联合仿真,从而建立悬架振动-车身振动-声固耦合声场的联合预测方法。
通过试验的方法,基于主成分分析和多重相干技术,对道路噪声主动控制系统的参考信号的布置位置和数量进行选取。
利用车内自带的扬声器,建立道路噪声的主动控制系统,并运用自适应滤波算法,实现对宽频噪声的控制。
技术路线和方法:
项目的研究方案是:首先进行中国用户典型路面的道路噪声采集和半消声室转鼓试验,对噪声特性进行分析。利用试验数据,从道路噪声预测虚拟样机与道路噪声主动控制两个层面着手,对车辆道路噪声进行优化。道路噪声虚拟样机方面,利用道路谱模型、声固耦合有限元仿真等手段建立虚拟样机,实现对道路噪声的仿真预测。利用灵敏度分析与板件贡献分析的方法分别对车内道路噪声进行影响因素分析;噪声主动控制方面,建立基于自适应滤波的噪声主动控制仿真模型,使用遗传算法对系统参数进行优化,基于主成分分析和重相干理论,对参考信号的数量和位置进行选取。最后,利用dSPACE建立道路噪声主动控制原型车,在典型路面及典型工况下进行道路试验,验证系统的可行性。

图1 技术路线
成果技术水平:
1、中国典型路面道路噪声与转鼓试验
1)搭建了道路噪声的试验测量系统,在小方砖路面、粗沥青路面等进行了噪声采集试验,测量了车内乘员位置的声压级信号,编制了中国用户典型路面的道路谱特性分析报告。结果显示,车内道路噪声主要由轰鸣声(75-100Hz和120-140Hz)和轮胎空腔共鸣声(210-240Hz)组成。轰鸣声主要由路面引起的悬架振动以及车身板件与车内声腔的相互耦合造成。轮胎空腔共鸣噪声主要是轮胎空腔共振经悬架传递到车身引起。因此,在参考信号选取和噪声主动控制中,应着重关心75-140Hz和210-240Hz频带内的噪声。

图2 道路噪声特性
2)在消声室转鼓上进行了道路噪声再现试验,结果显示,消声室试验和道路试验具有一致性,说明转鼓试验可以再现整车道路试验下的车内噪声。消声室转鼓具有路面一致、干扰较少、缺少风噪和发动机噪声等优势,可以用转鼓试验评价车辆的车内噪声。
2、道路噪声预测样机开发与优化
1)建立了整车有限元模型、整车声腔有限元模型和整车声固耦合有限元模型;

图3 整车声固耦合有限元模型
2)使用随机响应理论,在小方砖路面80km/h滑行至20km/h的工况下,计算了车内驾驶员和乘员耳旁的声压响应以及悬架位置的振动响应。通过不同工况下的试验结果对比,所建立的有限元模型有效。

图4 仿真与实验结果对比
3)基于整车声固耦合有限元模型进行了道路噪声的激励源影响分析以及板件贡献量分析。前排乘员耳旁声压板件贡献度主要与前门、前围板有关,后排乘员耳旁声压板件贡献度主要与后排地板有关。
3、主动噪声控制系统建模与仿真
1)基于主成分分析和多重相干理论,提出了一套道路噪声主动控制系统参考信号的选取方法。首先通过常相干分析在36个初始加速度信号中选择了18个最相干的信号,使用主成分分析的方法确定了参考信号的数量为6个。然后以多相干函数为优化目标,从18个参考信号中选择了多相干函数最大的6个信号作为参考信号组合。在关心频带内,重相干函数均达到了9以上。
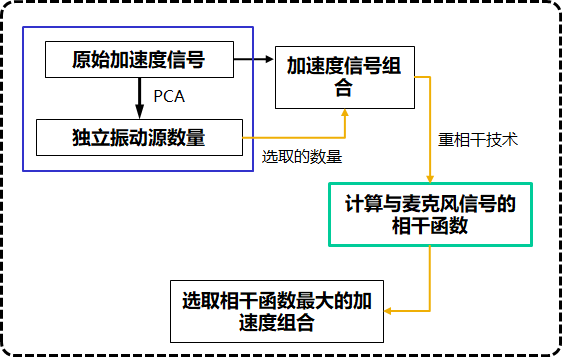
图5 参考信号的选取方法
2)推导了多通道道路噪声主动控制系统的算法,基于此算法搭建了单通道和多通道道路噪声主动控制系统的仿真模型,使用实验测得的数据进行了离线仿真,取得了较好的降噪效果,验证了算法的正确性。
3)使用sobol法对系统的参数进行了灵敏度分析,结果发现对最大降噪量的影响程度从大到小依次为:收敛系数、滤波器阶次和信号增益。使用正交表及综合平衡法确定了三个参数的优水平和优化区间。使用多目标遗传算法对系统的收敛系数、滤波器阶次、信号增益进行了优化。优化后的最大降噪量比优化前取得了明显的提升。

图6? 遗传算法参数优化前后降噪量对比
4、主动噪声控制系统硬件在环试验
1)对道路噪声主动控制系统的硬件进行了匹配,基于这些硬件信息,搭建了道路噪声主动控制系统原型车,并对该系统进行了试验分析,表明系统的实时性、输出准确性、计算可靠性都较好。
2)使用6个加速度信号、2个声压信号、原车扬声器、功率放大器、dSPACE以及信号调理仪等设备,搭建了基于dSPACE的道路噪声主动控制系统硬件在环实验平台。
3)进行了道路噪声主动控制系统的台架激励试验,在单频、扫频和白噪声的激励下均取得了良好的降噪效果,最大降噪量可达30dBA。进行了道路试验,在小方砖路面、粗沥青路面、平滑沥青路面等路面上进行了道路噪声控制与采集,均取得了较好的降噪效果,最大降噪量可达9dBA。

图7? 粗沥青路面60km/h的降噪效果
二、技术创新点
1、建立了车身声固耦合有限元模型,基于此声固耦合模型,使用随机响应分析理论,实现了对道路不平度引起车内噪声的仿真预测。基于此方法,对车内道路噪声的影响因素及板件贡献量进行了分析。
2、推导了多通道道路噪声主动控制算法,建立了单通道、多通道道路噪声主动控制系统仿真模型,使用实验测得的数据,均取得了良好的降噪效果。基于此仿真模型,使用多目标遗传算法,对模型的参数进行了优化设计。
3、提出了一套道路噪声主动控制系统参考信号的选取方法,使用主成分分析和多重相干分析的方法,对道路噪声主动控制系统的参考信号布放位置和数量进行了选取,在关心频带的相干度均可达到9以上。
4、搭建了道路噪声主动控制系统样车,进行了台架试验(单频激励、扫频激励、白噪声激励)和道路试验(小方砖路面、粗沥青路面),台架试验的降噪量最大可达30dBA,道路试验的最大降噪量可达9dBA。
三、专利/论文/获奖情况
1、论文:
- 张立军,皮雄飞,曹诚,束元,赵野,张梦浩,孟德建.基于自适应滤波的车内道路噪声主动控制系统[J],《振动测试与诊断》,已录用
- Cao C , Meng D , Zhao Y , et al. Prediction and Optimization of Full-Vehicle Road Noise Based on Random Response Analysis[J]. Journal of Physics Conference Series, 2021, 1828(1):012166.(EI收录号:20211310154654)
2、发明专利:
- 发明专利(已申请):
专利名称:一种道路噪声主动控制系统次级通路建模准确性的在线验证方法
发明人:张立军? 皮雄飞? 孟德建? 曹诚? 束元? 赵野? 张孟浩
专利权人:同济大学、上汽大众汽车有限公司
四、成果应用及经济效益预测预测
成果应用:
随着新能源汽车的发展,汽车的动力学噪声越来越轻,汽车的道路噪声将成为主要的低频噪声源,本项技术大大改善了汽车的道路噪声。通过两年多的研究,搭建了两台样品车,在不同路面不同车速下均实现了良好的降噪效果。
经济效益:
本项目虚拟样机设计,提升了上汽大众的自主研发能力,提升产品设计的效率,减小产品设计周期,并且降低产品下线后用户抱怨的概率,提升产品的质量。该技术为企业节约大量研发成本。
长期以来,车内噪声主动控制系统一直受到国外企业的垄断,导致系统价格居高不下。本项目噪声主动控制的研究,打破了这一领域的垄断,使得企业采用这一技术的成本大大降低,具有很强的经济效益。
]]>
基于多传感器融合的周边车辆行人检测与跟踪
Vehicle and pedestrian detection and tracking based on multi-sensor fusion
项目研制单位:同济大学 ?泛亚汽车技术中心有限公司
主要研制人员:尤鸣宇 ?王平 ?徐维庆 ?陈威
主题词:多传感器融合 ?检测与跟踪 ?深度学习
1、研究内容介绍
近年来随着计算机硬件计算能力的提升和大数据的发展,基于深度学习框架的计算机视觉研究成为了热门,基于视觉的目标检测与跟踪领域取得了巨大的突破。然而,实际场景的复杂程度远远超过了深度学习模型的训练数据集,数据分布的偏差极大降低了现有模型的准确性和稳定性。目前制约车辆行人检测与跟踪技术发展的主要因素包括现实场景中背景复杂多样、各种场景下光照强弱不一、行人及车辆之间相互遮挡或者被其他物体遮挡等等。而多传感器信息融合系统解决的关键问题包括不同传感器信息融合系统的工作频率不同、时延不同、能力不同等问题。
因此,针对以上在现实场景中存在的各类问题,以及系统对实时性的要求,本研究旨在通过由视觉摄像头和激光雷达组成的多源传感器进行信息获取,研究多传感器信息融合技术,在复杂工作环境下,有效克服单一传感器信息获取的局限性,并研究深度检测与跟踪算法的框架设计,改进优化深度检测与跟踪模型的网络结构,研究设计更高效、更精确、更鲁棒的深度检测与跟踪模型。本项目研究内容如下所示:
(1)鱼眼成像的矫正与拼接
1)建立鱼眼镜头的单位球面投影数学模型;
2)对比各类鱼眼矫正方法的矫正效果。
(2)基于深度学习的车辆、行人检测算法的研究
1)构建基于YOLOv5的深度神经网络作为检测基础模型;
2)通过各种数据扩充方法,缓解数据集类别不均衡的问题,提高YOLOv5深度模型的检测准确率;
3)CNN的深层特征图有着丰富的语义信息,而浅层特征图携带着细节信息,研究结合两者优势的融合方法;
4)针对交通场景中行人密集、遮挡严重和目标小的特点,改进优化深度检测模型,改进特征提取网络和多尺度检测算法;
5)针对实时性的要求,在保证精度的情况下,利用深度可分离卷积改造YOLOv5中的基本网络结构,减少模型参数,加快检测速度。
(3)基于深度学习的多目标跟踪算法的研究
1)根据DeepSORT算法,利用检测器、外观特征提取和数据关联等模块进行目标跟踪;
2)在不同天气、不同地点和不同车速的条件下采集车辆行驶的传感器数据,并手工标注各个目标类别,制作相较于国外公开数据集更贴近我国道路特点的训练数据集;
3)将改进后的YOLOv5检测模型作为DeepSORT跟踪算法的检测器,从而得到每一帧目标的预测边框;
4)基于目标运动连续的特性,利用卡尔曼滤波算法来进行目标的状态估计,再结合目标的状态观测,从而得到目标的最优状态更新;
5)利用以现有大规模数据集预训练的CNN分类网络提取特征,使用L2归一化操作将特征映射到单位超球面上,提高目标外观特征的提取能力;
6)基于马氏距离与余弦距离来度量目标的时空特征相似度,并基于匈牙利算法实现快速高精度的多目标数据关联;
(4)多传感器联合标定方案的研究
1)建立基于针孔模型的相机成像模型,构建世界坐标系、相机坐标系、图像坐标系与像素坐标系之间的转换关系;
2)基于Harris算子获取角点在图像中的像素坐标与世界坐标下的三维坐标,并基于非线性最小二乘Levenberg-Marquard算法求解得到相机的内外参矩阵;
3)构建激光雷达的点云数据坐标与摄像机像素坐标之间的转换关系,并通过棋盘格标定方法实现激光雷达与摄像机的联合标定。
(5)多传感器融合算法的研究
1)数据级融合:建立多传感器数据综合处理平台,实时采集各种传感器感知的数据,为上层数据访问提供统一的抽象接口,并提供推送和订阅两种访问方式;
2)特征级融合:利用激光雷达对有效目标进行筛选,将雷达信息转换到图像环境下,建立感兴趣区域,对目标图像进行预处理、特征提取;
3)决策级融合:将不同传感器得到的目标特征传入融合中心,基于协方差交叉融合等方法对多目标进行航迹关联与融合,以维护有效目标列表,最大限度地提高多目标跟踪的精准度。
融合系统的可视化结果如下图所示。

(a)同时刻摄像头感知结果

(b)同时刻融合感知结果
2、技术创新点
本项目从车辆软硬件改装、鱼眼成像矫正、车辆行人检测与跟踪的深度学习模型改进、多传感器联合标定以及多传感器信息融合等方面进行了研究。本项目的先进性技术总结如下:
(1)针对KITTI数据集中类别不平衡的问题,本项目对数量较少的person和cyclist类别进行数据扩充,在原图中裁剪出person及cyclist类型并贴到新的背景中构成新样本。实验结果表明,上述数据扩充方法能够有效提高目标检测准确率。
(2)针对YOLOv5特征提取网络过深导致感受野小、从而导致小目标漏检率高和检测精度低的问题,本项目提出了改进YOLOv5多尺度检测网络,通过增加输出通道数量来使模型变得更宽。实验结果表明,新提出的特征提取网络结构能够有效提升对于小目标的检测效果。
(3)针对获取先验框时K-means算法聚类效果不准确、获取的锚点框与数据特征匹配度低等问题,本项目采用K-means++聚类算法进行改进,对于初始的K个聚类中心点不再随机选取,而是通过轮盘法的方法进行选取,使初始的聚类中心点之间的相互距离尽可能远。实验结果表明,K-means++聚类算法的聚类效果更佳,能够提升目标检测的准确率。
(4)针对相机可能产生的晃动现象以及目标行人和车辆的遮挡等情况,本项目考虑设计高效的特征提取网络,最后使用L2归一化将特征映射到单位超球面上,以便后续使用马氏距离和余弦表观来度量目标相似度。
- 专利/论文/获奖情况
备注:泛亚技术中心法务部门指出若与外部联合申请专利,不可以走公司申请流程,故所有专利由同济大学单独申请。
本项目共申请专利9项。
1)一种基于选择性知识传递的双特长教师模型知识融合方法,尤鸣宇,王伟昊,周洪钧,申请号:CN202110218021.0,申请日:2021.02.26
2)一种面向循环神经网络的无监督多模型融合算法,尤鸣宇,韩煊,申请号:CN202210071568.7,申请日:2021.01.21
3)一种使用残差注意力机制网络的同步定位与建图方法,张佳伟,尤鸣宇,申请号:CN201911190243.5,申请日:2019.09.25
4)一种基于第三视角可变主体演示视频的机械臂模仿学习方法,尤鸣宇,周虹旭,钱智丰,周洪钧,申请号:CN202110218017.4,申请日:2021.02.26
5)一种基于triplet深度二值网络的快速人脸检索方法,尤鸣宇,沈春华,张欣彧,申请号:CN201810026049.2,申请日:2018.01.11
6)一种跨摄像头目标检测与跟踪系统及方法,王平, 王超, 王新红, 朱纪龙, 国家发明专利,申请号:CN202210140025.6,申请日:2022.02.16
7)一种基于车路协同的道路车辆定位及感知方法和装置,王平, 刘富强, 王超, 王新红, 黄陈明, 国家发明专利,申请号:CN202010457794.X,申请日:2020.05.26
8)一种面向路口的智能化本地动态地图实现系统及实现方法, 王平, 刘富强, 王新红, 周宇, 申请号:201810856907.6, 申请日:2018.07.31
9)一种基于车路协同的陀螺仪道路状态识别及提示方法, 刘富强, 杨海军, 王平, 王新红, 罗肖, 冯秋维, 申请号:201810552965.x, 申请日:2018.05.31
4、成果应用及经济效益预测
“基于多传感器融合的周边车辆行人检测与跟踪”项目研制多传感器信息融合技术,在复杂工作环境下,有效克服单一传感器信息获取的局限性,并检测与跟踪出不同情况下的车辆行人目标,是实现安全辅助驾驶和智能车辆系统的关键技术具有较高的推广应用前景并有潜力转化为可观的经济效益和社会效益。
本项目开发部署的泛亚工程驾驶车辆已具备智能融合目标物,有望在复杂场景下弥补现有传感器目标检测方案缺点,比如夜晚,大雨等环境下摄像头及激光雷达传感器局限场景。提高系统冗余性能。
同时,项目基于Ubuntu系统下的ROS平台开发软件系统具有极佳的灵活性及可拓展性,面向未来多样化场景及任务需求,本方案仅需要适应性调整即可满足新需求,降低进一步开发难度,节约研发经费。
项目设计了完整的环境感知模块及多传感器融合模块,适用于企业安全辅助驾驶感知模块性能的提高。提高资产利用率和生产力,进一步改善当下的智能驾驶安全辅助功能,提高社会智能驾驶功能开发安全性。
]]>