本课题由同济大学、以及武汉中海庭数据技术有限公司、上汽大众汽车有限公司、华域汽车股份有限公司共同承担。
秘书处于2025年1月17日组织来自上汽研发总院、泛亚技术中心、友道智途、赛可智能、零束科技共5名资深工程技术人员,采用腾讯视频会议方式,对该课题进行了结题验收评审。
项目组基于搭建的3个路侧感知平台(同济智能网联汽车测试场、安亭昌吉东路-于塘路十字路口、无锡车联网先导区和风路路段)与1个移动感知平台,研究提出的分布式多模态感知设备的空间标定、时间同步与数据帧对齐方法,可满足车路协同感知的时空同步需求;研究提出的静态、半静态、动态目标感知算法以及支持中融合和后融合的车路协同融合方法,研究设计的C-V2X车路通信协议栈以及基于车路协同感知融合的高精度地图管理与更新系统,可实现静态、半静态、动态目标检测、地图匹配与更新功能。以上成果经企业吸收消化后,在临港新片区云控平台高精度地图更新项目中得到了应用,实现了云控平台与路侧RSU设备、测绘车、众包车、用户车辆之间针对道路施工、交通拥堵、临时交通管制等动态信息实时采集、传输、分析处理、地图更新等功能,可提高数据的准确性和时效性,提升车辆驾乘体验。
经专家评定,综合得分77.9分,同意验收。
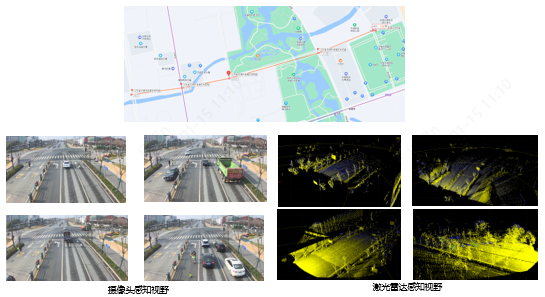
无锡车联网先导区路侧感知系统