本课题由上汽变速器公司、商用车技术中心和同济大学共同承担。
2025年1月24日下午,基金会秘书处组织同济大学、上汽变速器公司、商用车技术中心、研发总院、联合电子、泛亚、华域股份等单位共25人,通过腾讯会议方式,对基金会产学研项目《智能化自行走底盘系统设计与动态协调控制研究》(2212课题)进行了阶段性(中期一阶段)研究成果技术汇报交流。
本课题根据轮毂电动轮构型分析以及车轮空间布置条件,选择内转子扁线电机、行星减速器与鼓式制动器的集成方案,打破国外专利封锁,提出一种新型轮毂电动轮构型,实现与大通EV90的集成。根据整车性能指标得到电机性能指标,结合电机设计空间,进行了电机结构设计和冷却系统设计;确定电机的电磁参数和结构参数,并完成了电机系统在电动轮内的集成;根据整车-减速器参数匹配表选定行星齿轮减速器的速比,进行几何构型和关键参数匹配设计,开展了电动轮总成动密封系统、轴承支撑系统和壳体支撑系统设计;匹配了制动系统的性能指标,确定了制动系统的设计空间;开展了电动轮制动系统的集成设计,根据结构关键参数和电机控制参数完成了电机控制器选型匹配与接口设计、线束分类与连接策略设计等工作。
项目研制工作达到了中期(一阶段)的预期目标。
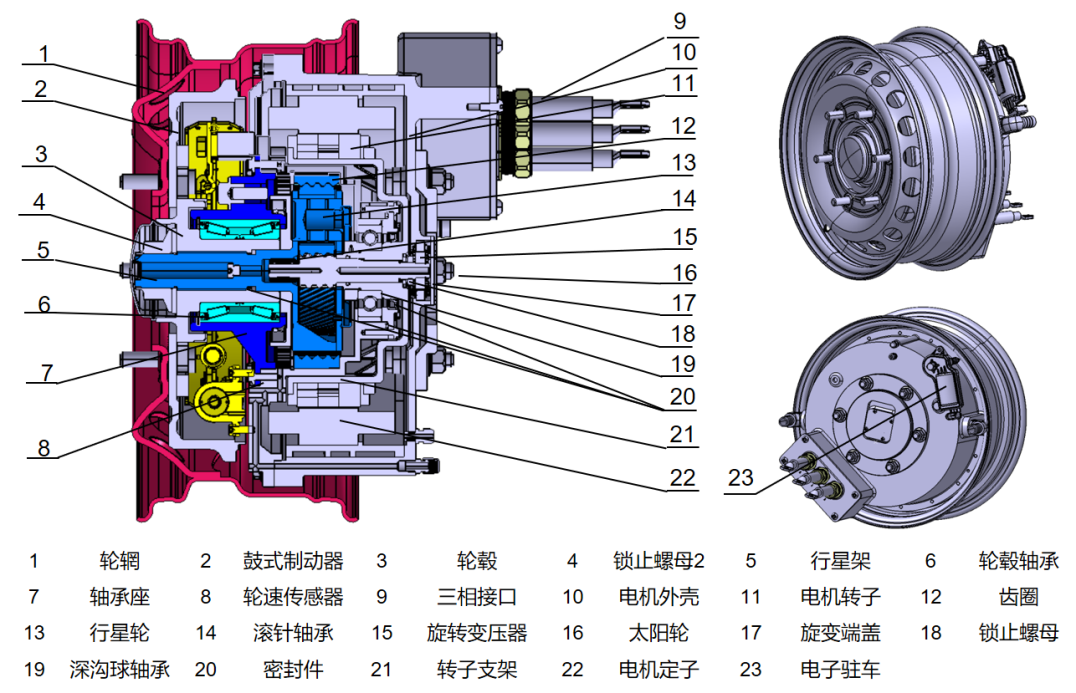
电动轮三维模型图