本课题由上海交通大学和上汽大众联合承担。
2021年11月4日,基金会秘书处组织协调上海交通大学、上汽大众、以及上汽技术中心、上汽商用车技术中心、上海机动车检测中心共23名人员,通过腾讯视频会议方式,围绕《智能驾驶汽车功能自动化评测体系的设计和研究》(1904)课题进行了阶段性(中期)研究成果技术汇报交流。
课题组借鉴德国OpenSCENARIO自动驾驶动态场景标准、 PEGASUS高度自动车辆系统设计测试开发流程,结合中国具体情况,针对封闭园区最后一公里自动泊车场景进行了功能场景的定义和参数范围的确定,搭建完成11大类共66个功能场景、558个具体场景的场景库;完成了仿真测试平台VTD-CarSim工具链的搭建,实现了VTD场景和CarSim软件之间的连接通信,打通了整个仿真测试工具链,可通过CarSim与Simulink里面的控制算法完成VTD场景中的车辆控制;通过自行编写的侧方泊车和垂直泊车场景下的泊车程序,初步实现了在VTD-CarSim联合仿真平台上倒车入库并躲避行人的功能,验证了联合仿真平台的可行性;从安全性、舒适性、驾驶性能、标准性四个维度建立了智能驾驶汽车最后一公里自主泊车测试评价体系,按三级指标定量化地给出了测试评价标准,完成了自动化评测系统的初步开发,并选取简单的泊车场景和部分指标,进行了自动化测试以及评价系统的调试和验证。
基本达到中期预期目标。
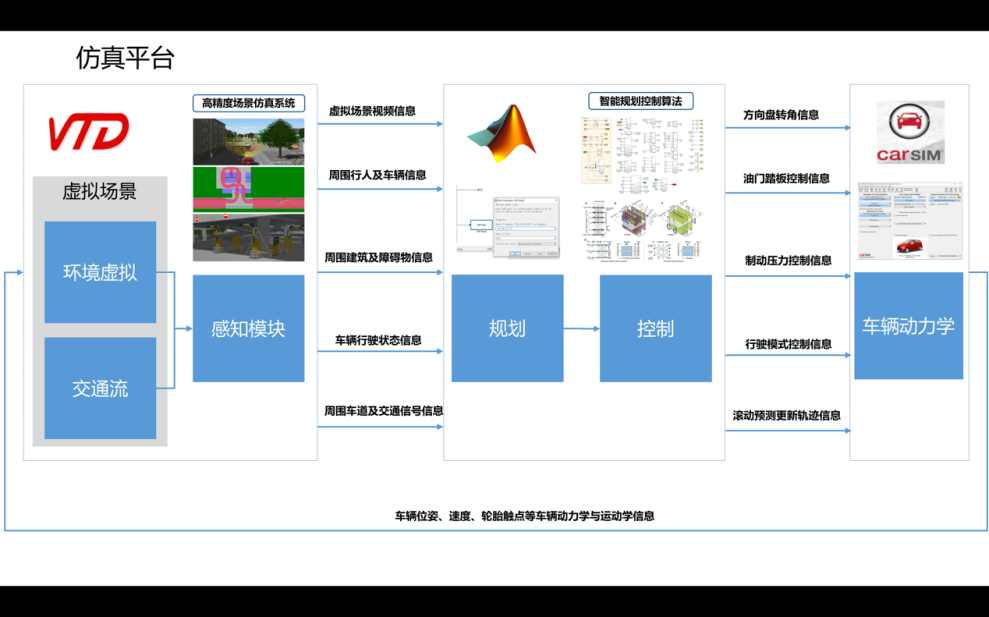
VTD-CarSim联合仿真平台工具链搭建