本课题由浙江大学和上汽研究总院(原上汽前瞻技术研究部)&泛亚技术中心联合承担。
2022年5月12日,基金会秘书处组织协调浙江大学、上汽研究总院(原上汽前瞻技术研究部)、泛亚技术中心、以及上汽商用车技术中心、上汽大众、赛可智能、联合电子、华域股份共25名人员,通过腾讯视频会议方式,围绕《数据驱动的固态激光点云聚类、跟踪与预测方法研究》(2010)课题进行了阶段性(中期)研究成果汇报(技术交流)会。
课题组开发了基于雷达伪视差直方图和高程图过滤的集成算法,实现了道路与非道路的准确分割,准确率95.38%,耗时87.72ms;基于开源算法CenterPoint实现单帧检测结果,并在此基础上提出了基于场景流指导的特征级对齐的多帧检测器,提出了粗分割掩膜进行前景和背景的过滤,提出了帧间注意力进行特征加权,实现了多帧检测器对道路场景感兴趣目标的检测率达到92.17%,耗时69.93ms;实现了多帧目标检测算法对集装箱卡车、异形车(如叉车)以及卡车装载异形货物等大型车辆检测的性能优化,在大型车辆上AP达到71.28%,改善了检测性能;开发了基于卡尔曼滤波器的障碍物跟踪模块,解决障碍物目标短暂丢失、障碍物间相互遮挡等多目标复杂场景,实现稳定连续跟踪,目标跟踪指标sAMOTA达到86.28%,目标跟踪稳定性为92.85%。
达到中期预期目标。
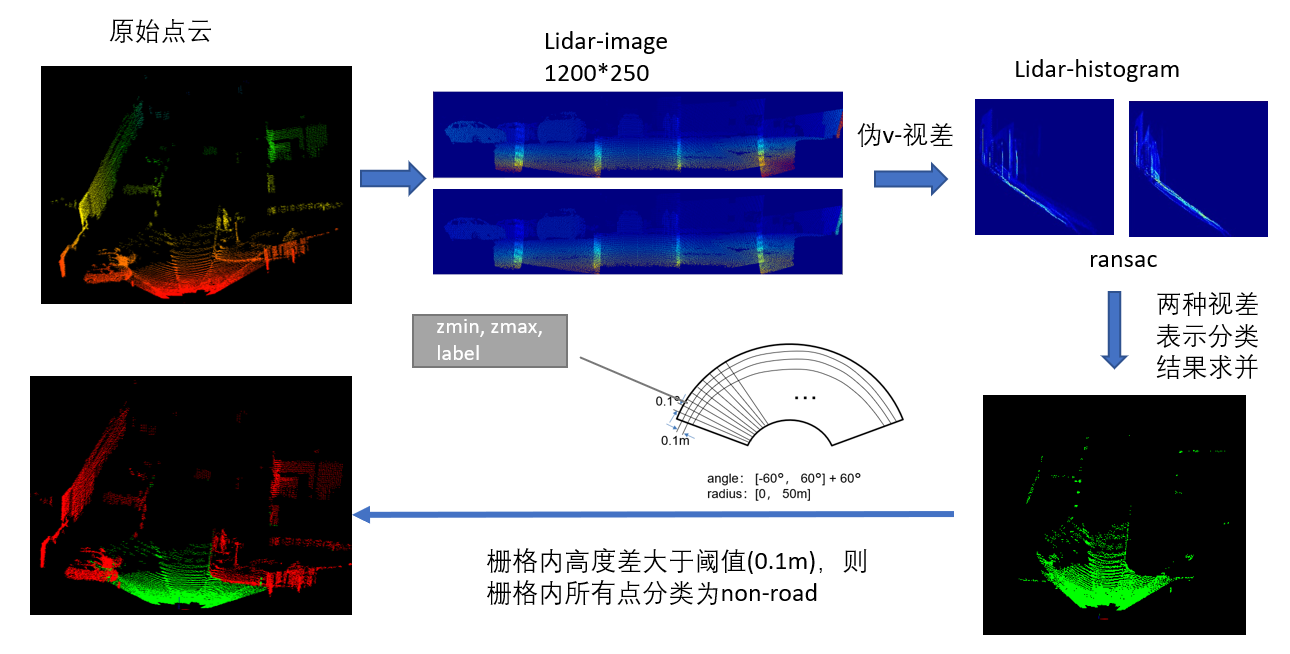
道路分割算法整体结构